

Ressources / Guide / Underwater Navigation Systems: How ROVs and AUVs Navigate Without GPS
Guide
Underwater Navigation Systems: How ROVs and AUVs Navigate Without GPS
An underwater navigation system is a set of technologies that helps vehicles and divers know where they are and where they’re going underwater.
GPS transformed navigation on land, in the air, and at sea.
But once a vehicle goes underwater, GPS signals disappear.
That creates a navigational challenge for work underwater like offshore inspections, hydrographic surveys, or subsea construction projects, scientific research.
To solve this problem, underwater navigation systems combine technologies like acoustic positioning systems, Doppler Velocity Logs (DVLs), Inertial Navigation Systems (INS), and surface GPS references. Together, these systems help divers, remotely operated vehicles (ROVs), AUVs, and other subsea assets maintain accurate positioning and navigation information while underwater.
In this guide, we’ll explain how underwater navigation systems work, the technologies that make them possible, how different navigation methods are used across offshore operations, and how to choose the right navigation approach for a specific mission.

What Is an Underwater Navigation System?
An underwater navigation system is a collection of technologies that help divers, remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), and other subsea assets determine where they are, where they’ve been, and where they’re going while underwater.
Most offshore inspections, hydrographic surveys, and autonomous subsea operations depend on multiple navigation technologies working together rather than a single positioning tool.
Unlike surface vehicles, underwater assets can’t rely on GPS for continuous positioning.
Instead, they use a combination of acoustic positioning systems, motion sensors, velocity measurements, and inertial navigation technologies to maintain situational awareness throughout a mission.
Why GPS Doesn’t Work Underwater
Every underwater navigation system exists because GPS signals can’t effectively penetrate water.
GPS relies on radio-frequency signals transmitted from satellites. These signals travel well through the atmosphere but are rapidly absorbed once they encounter water, particularly saltwater.
As a result, submerged vehicles lose direct access to satellite positioning shortly after diving below the surface.
[Lire aussi : Underwater GPS Explained]
To solve this problem, underwater operations typically combine vessel-based GPS with subsea navigation technologies that can continue providing position and movement information below the surface.
Navigation vs. Positioning vs. Tracking
Many people use the terms underwater navigation, underwater positioninget underwater tracking interchangeably.
While closely related, they describe different functions:
- Positioning determines a vehicle’s location.
- Tracking monitors how that location changes over time.
- Navigation combines location, movement, heading, speed, and guidance information to help a vehicle reach a desired destination.
Navigation is the broader concept.
It incorporates positioning and tracking data while helping operators or autonomous systems understand how a vehicle is moving through the underwater environment.
How Underwater Navigation Systems Work
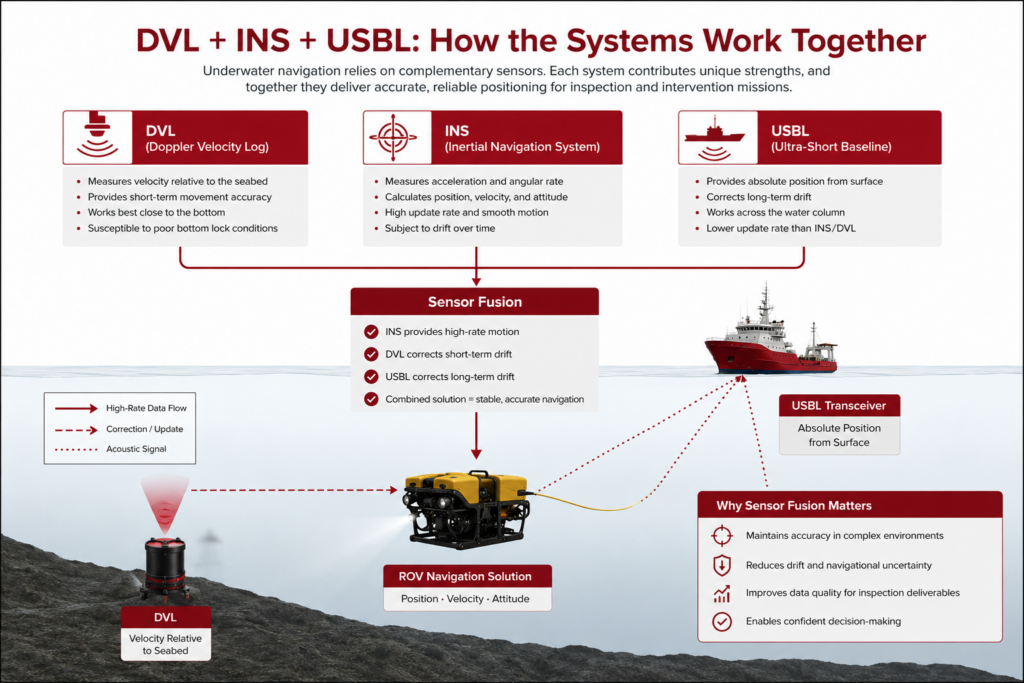
Most underwater navigation systems combine multiple sensors because no single technology performs well in every situation.
For example, an ROV performing a subsea inspection may use an acoustic positioning system to determine its location relative to a vessel, a Doppler Velocity Log (DVL) to measure movement across the seafloor, and an Inertial Navigation System (INS) to estimate position between acoustic updates.
Together, these technologies create a more complete navigation solution, helping operators maintain accurate positioning even when conditions change or acoustic updates become less frequent.
Components of an Underwater Navigation System
Most underwater navigation systems use a combination of several technologies.
Each component contributes different information.
Some technologies determine position, some measure movement, and some help estimate location between position updates.
Together, they create a more complete picture of where an underwater vehicle is and how it is moving.
Here’s an overview of the primary components that make up an underwater navigation system:
Here’s more information about the primary technologies used in underwater navigation systems:
Doppler Velocity Logs (DVLs)
A Doppler Velocity Log (DVL) measures a vehicle’s velocity relative to the seafloor or surrounding water by analyzing changes in reflected acoustic signals.
In practical terms, a DVL tells an underwater vehicle how fast it is moving and in what direction.
This information becomes especially valuable when GPS is unavailable and acoustic position updates are infrequent.
DVLs are commonly used on ROVs, AUVs, and survey platforms because they provide highly accurate movement measurements that can be combined with other navigation sensors.
Inertial Navigation Systems (INS)
An Inertial Navigation System uses accelerometers and gyroscopes to estimate position, velocity, and orientation.
Unlike acoustic positioning technologies, an INS does not require external references to function. It continuously calculates movement based on measured acceleration and rotational motion.
This makes INS technology extremely valuable during periods when acoustic updates are unavailable or temporarily interrupted.
The limitation is that small measurement errors accumulate over time, causing navigation drift.
For this reason, INS systems are typically paired with technologies such as DVLs, USBL systems, or LBL systems that provide periodic position corrections.
USBL Systems
Ultra-Short Baseline (USBL) systems use acoustic communication between a vessel-mounted transceiver and an underwater transponder to determine the position of a vehicle or target.
USBL systems are among the most widely used underwater positioning technologies for offshore inspection, survey, and construction operations because they provide real-time tracking without requiring extensive subsea infrastructure.
USBLs are commonly used to track:
- ROVs
- AUVs
- divers
- subsea tools
- recovery targets
USBL systems are often a key component within larger underwater navigation workflows rather than a complete navigation solution on their own.
LBL Systems
Long Baseline (LBL) systems use multiple acoustic transponders placed on the seafloor to create a highly accurate underwater positioning network.
Because the reference points remain fixed underwater, LBL systems can often achieve greater positioning accuracy than vessel-referenced methods.
This accuracy comes with additional deployment complexity.
Installing and calibrating an LBL network requires time, planning, and access to the operating area.
LBL systems are commonly used for high-accuracy survey work, subsea construction projects, scientific research, and long-duration AUV missions where precision is critical.
Acoustic Positioning Systems
Acoustic positioning systems use sound waves to determine the location of underwater vehicles, targets, or personnel.
USBL, LBL, and SBL systems all fall within the broader category of acoustic positioning technologies.
Acoustic systems form the backbone of many underwater navigation workflows because sound travels much farther through water than radio-frequency signals.
They provide the position updates needed to correct navigation drift and maintain situational awareness throughout a mission.
In many offshore operations, acoustic positioning systems serve as the primary source of location information for underwater vehicles.
How Underwater Navigation Systems Work Together
The most effective underwater navigation systems combine multiple technologies to compensate for the limitations of each individual component.
This process is often called sensor fusion.
By combining data from a range of sources, operators can maintain accurate navigation information throughout a mission.
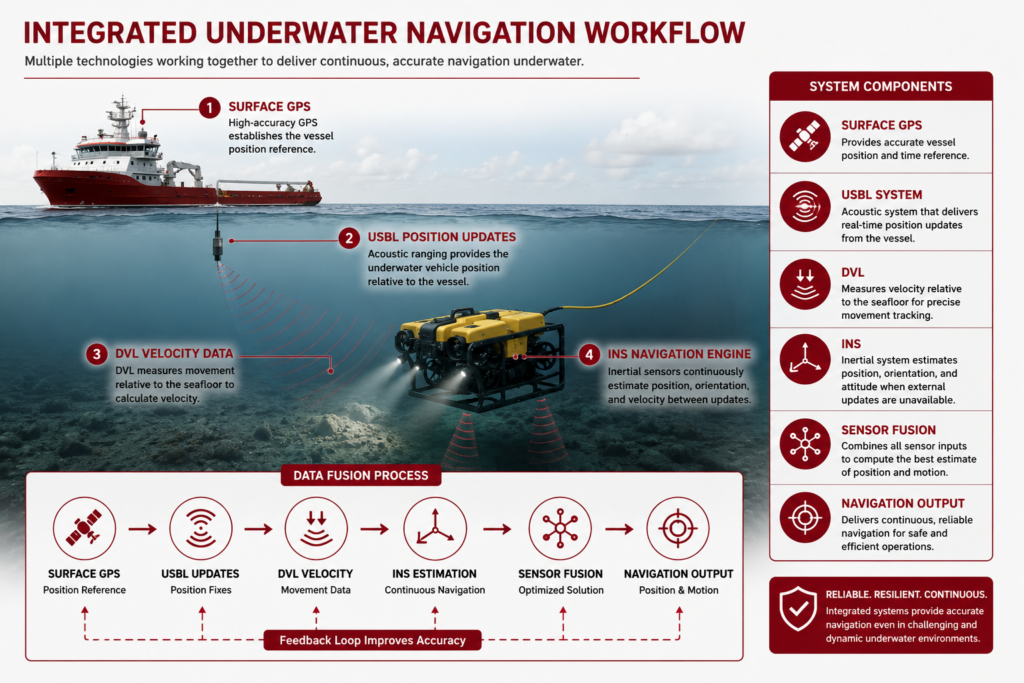
While the technologies involved may vary, most underwater navigation systems follow a similar workflow:
1. Surface GPS Establishes the Reference Point
Underwater navigation often starts at the surface, where GPS is still available.
- What it provides: geographic position for the vessel or platform
- Why it matters: gives the subsea system a known reference point
- In practice: vessel GPS is often combined with USBL tracking data
2. Acoustic Systems Send Position Updates Underwater
Once the vehicle is submerged, acoustic systems help determine where it is relative to known reference points.
- What it provides: periodic position updates
- Why it matters: helps correct navigation drift
- In practice: USBL, LBL, or other acoustic systems track the vehicle during the mission
3. DVLs Measure Vehicle Movement Between Updates
Between acoustic position fixes, a DVL measures how the vehicle is moving through the water or across the seafloor.
- What it provides: speed and direction of movement
- Why it matters: improves continuity between position updates
- In practice: DVL data helps operators maintain a smoother estimate of vehicle motion
4. INS Systems Estimate Position Between External References
An INS uses onboard motion data to estimate position, orientation, and velocity when external updates are limited.
- What it provides: continuous navigation estimates
- Why it matters: keeps navigation data available when acoustic updates are delayed or interrupted
- In practice: INS data is corrected by DVL and acoustic positioning inputs to reduce drift
5. Sensor Fusion Combines the Data Into a Navigation Solution
The final navigation output comes from combining all of these data sources into one working estimate of vehicle position and movement.
- What it provides: a continuous underwater navigation solution
- Why it matters: improves reliability compared to any single sensor alone
- In practice: GPS, acoustic positioning, DVL, and INS data are combined to support inspection, survey, and AUV missions
Common Underwater Navigation Workflows
The right underwater navigation system depends on the mission being performed. An offshore inspection ROV has different requirements than an autonomous survey vehicle operating for hours over a large area. Likewise, diver tracking operations prioritize different capabilities than subsea construction or hydrographic mapping projects. Understanding these differences can help operators choose technologies that fit their objectives rather than simply selecting the most advanced system available. Here’s a look at how navigation systems are typically used across common underwater missions.ROV Inspections
Primary objective: Maintain accurate vehicle positioning while inspecting a subsea asset. Typical navigation workflow:- Deploy the ROV from a support vessel
- Track vehicle position relative to the vessel and asset
- Maintain stable positioning during close-proximity inspections
- Document inspection findings with known location references
- USBL systems
- DVLs
- Onboard navigation sensors
AUV Missions

Primary objective: Navigate accurately during autonomous operations with limited operator intervention.
Typical navigation workflow:
- Establish mission waypoints before deployment
- Navigate between survey or inspection targets
- Estimate position continuously throughout the mission
- Correct navigation drift using periodic position updates
Common navigation technologies:
- INS systems
- DVLs
- Acoustic positioning systems
- Depth and heading sensors
Hydrographic Surveys
Primary objective: Collect survey data that can be accurately tied to geographic coordinates.
Typical navigation workflow:
- Establish survey control and reference positions
- Follow planned survey lines across the work area
- Maintain accurate position throughout data collection
- Correlate collected data with verified coordinates
Common navigation technologies:
- USBL systems
- LBL systems
- DVLs
- INS platforms
- Surface GPS references
Diver Tracking Operations
Primary objective: Maintain real-time awareness of diver location and movement.
Typical navigation workflow:
- Deploy acoustic tracking equipment from the vessel or worksite
- Monitor diver position throughout the operation
- Maintain situational awareness as divers move around the asset
- Support diver safety and coordination during the mission
Common navigation technologies:
- USBL systems
- Acoustic diver tracking systems
- Surface GPS references
How to Choose the Right Navigation Workflow
The right underwater navigation workflow depends on balancing four factors: accuracy requirements, mission duration, deployment complexity, and operating environment.
1. Accuracy
Higher-precision applications often require INS platforms, LBL systems, or additional sensor fusion.
2. Mission duration
Longer missions generally require more sophisticated navigation architectures to minimize accumulated error.
3. Deployment complexity
Some systems can be mobilized quickly from a vessel, while others require seabed infrastructure and calibration.
4. Operating environment
Water depth, survey area size, and available support assets can all influence system selection.
For many offshore inspection projects, a USBL system combined with DVL data provides a practical balance between navigation performance and operational simplicity.
More demanding survey, construction, and autonomous vehicle missions often incorporate INS technology, LBL positioning, or additional acoustic references to achieve higher levels of accuracy.
Underwater Navigation Systems FAQ
Here are answers to some of the most commonly asked questions about underwater navigation systems.
Can GPS work underwater?
No. GPS signals are rapidly absorbed by water and become unusable below the surface. Because of this limitation, underwater vehicles rely on technologies such as acoustic positioning systems, Doppler Velocity Logs (DVLs), and inertial navigation systems (INS) to determine their location and movement.
What is the most accurate underwater navigation system?
There is no single answer because accuracy requirements vary by mission.
For many offshore inspection workflows, USBL systems combined with DVL data provide sufficient performance. For applications requiring higher positional accuracy, operators often incorporate INS technology and, in some cases, Long Baseline (LBL) positioning systems.
The most accurate solutions typically combine multiple technologies rather than relying on a single navigation sensor.
What is the difference between underwater navigation and underwater positioning?
Positioning focuses on determining location.
Navigation is broader and includes location, movement, speed, heading, orientation, and route tracking. Most underwater navigation systems incorporate positioning technologies as one component of a larger navigation workflow.
What’s the difference between a DVL and a USBL system?
A DVL measures movement relative to the seafloor or water column.
A USBL system determines position using acoustic communication between a surface transceiver and an underwater transponder.
Because they provide different types of information, DVLs and USBL systems are frequently used together rather than treated as competing technologies.
How do AUVs navigate underwater?
Most autonomous underwater vehicles use a combination of INS technology, DVL measurements, depth sensors, heading sensors, and acoustic positioning updates.
These systems work together to estimate position continuously while correcting navigation drift throughout the mission.
The exact navigation architecture depends on factors such as mission duration, required accuracy, operating depth, and available infrastructure.
What is an underwater tracking system?
An underwater tracking system is designed to determine and monitor the location of a vehicle, diver, or target underwater.
Tracking systems are commonly used for ROV operations, diver tracking, search-and-recovery missions, and subsea construction support. Many tracking systems use acoustic positioning technologies such as USBL systems.
While tracking focuses on location, navigation systems incorporate additional information such as speed, heading, orientation, and movement history.