

Offshore Resources / What Is a DVL? Doppler Velocity Logs for ROVs and AUVs
Guide
What Is a DVL? Doppler Velocity Logs for ROVs and AUVs
A Doppler Velocity Log (DVL) is an underwater navigation sensor used to measure the speed and movement of an underwater vehicle relative to the seafloor or surrounding water.
DVLs are commonly used on ROVs, AUVs, and other subsea platforms to support navigation, station keeping, survey operations, and autonomous missions where GPS signals can’t reach.
→ Jump to the best DVL systems on the market.
While a DVL can provide highly valuable navigation data, it’s typically only one part of a larger subsea positioning workflow.
Many offshore operations combine DVLs with technologies like USBL, INS, and acoustic positioning systems to improve navigation accuracy and reduce drift over long missions.
Other common terms for DVLs include:
- Doppler Velocity Log
- DVL sensor
- Underwater DVL
- DVL navigation system
- Doppler velocity logger
In this guide, we’ll cover what a DVL is, how it works, when it should be used, how it compares to USBL systems, and the leading DVL platforms available for offshore and subsea operations.
Best DVL Systems on the Market
Looking for a DVL system for an ROV, AUV, or subsea navigation program?
Below are some of the most widely used Doppler Velocity Log systems currently deployed across offshore energy, hydrographic surveying, subsea inspection, and autonomous underwater vehicle operations.
Here’s the list:
1. Water Linked DVL A50
The Water Linked DVL A50 has become one of the most popular compact DVL systems on the market, particularly for smaller ROVs, AUVs, and robotics platforms.
Its compact form factor, relatively low power consumption, and straightforward integration make it attractive for operators building navigation systems for smaller underwater vehicles.
Key features of the Water Linked DVL A50:
- Compact design. Designed for small underwater vehicles and robotics platforms.
- Bottom-track velocity measurements. Supports underwater navigation and station keeping.
- Flexible integration. Commonly paired with INS and autonomous navigation systems.
2. Nortek DVL Series
Nortek is one of the most established names in underwater navigation and oceanographic instrumentation.
The company’s DVL portfolio supports a wide range of subsea applications, from ROV navigation and AUV guidance to scientific research and offshore survey operations.
Key features of Nortek DVL systems:
- Multiple depth ratings. Available for shallow-water and deepwater operations.
- Proven offshore deployment history. Widely used across commercial and research applications.
- Vehicle integration support. Designed for use with modern navigation architectures.
3. Sonardyne Syrinx DVL
Sonardyne’s Syrinx DVL is designed for demanding offshore and subsea navigation environments where reliable velocity measurements are critical to overall positioning performance.
The system is commonly integrated with Sonardyne’s broader navigation and acoustic positioning ecosystem.
Key features of the Sonardyne Syrinx DVL:
- Offshore-focused design. Built for professional subsea operations.
- Navigation ecosystem integration. Commonly deployed alongside acoustic positioning technologies.
- Support for autonomous operations. Suitable for advanced underwater navigation workflows.
4. Advanced Navigation Hydrus DVL
The Hydrus DVL is designed for integration into modern autonomous underwater systems and compact subsea vehicles.
It’s frequently paired with inertial navigation systems to support dead reckoning and autonomous navigation in GPS-denied environments.
Key features of the Hydrus DVL:
- Designed for autonomy. Built to support autonomous underwater navigation.
- Compact footprint. Suitable for smaller vehicle platforms.
- INS integration. Commonly used within integrated navigation solutions.
5. Teledyne Marine Pathfinder DVL
The Pathfinder series is one of the most recognizable DVL product families in the offshore industry.
These systems are widely used on work-class ROVs, survey platforms, and autonomous underwater vehicles where long-term reliability and deepwater capability are required.
Key features of Teledyne Pathfinder DVL systems:
- Industry adoption. Commonly deployed across offshore energy and survey operations.
- Deepwater capability. Designed for demanding subsea environments.
- Established integration ecosystem. Compatible with many commercial navigation systems.
What Is a DVL?
A Doppler Velocity Log (DVL) is an underwater navigation sensor that measures how fast a vehicle is moving and in what direction relative to the seafloor or surrounding water.
A DVL helps answer the question, “How is the vehicle moving?” while acoustic positioning systems help answer, “Where is the vehicle?”
Unlike GPS, which provides an absolute position, a DVL measures velocity.
The distinction is important because velocity data helps determine where a vehicle is going, but not necessarily its exact location.
In practice, DVLs are commonly installed on ROVs, AUVs, autonomous surface vessels, and other subsea platforms that operate beyond the reach of satellite navigation signals.
[AUVs and ROVs are both UUVs (Unmanned Underwater Vehicles)—Learn More in This In-Depth Guide]

DVL technology has become a foundational component of modern subsea navigation because it provides continuous movement data that can be used to improve vehicle control, station keeping, dead reckoning, and autonomous navigation.
Many people assume a DVL is a complete positioning system. But in reality, a DVL is usually one component within a larger navigation architecture.
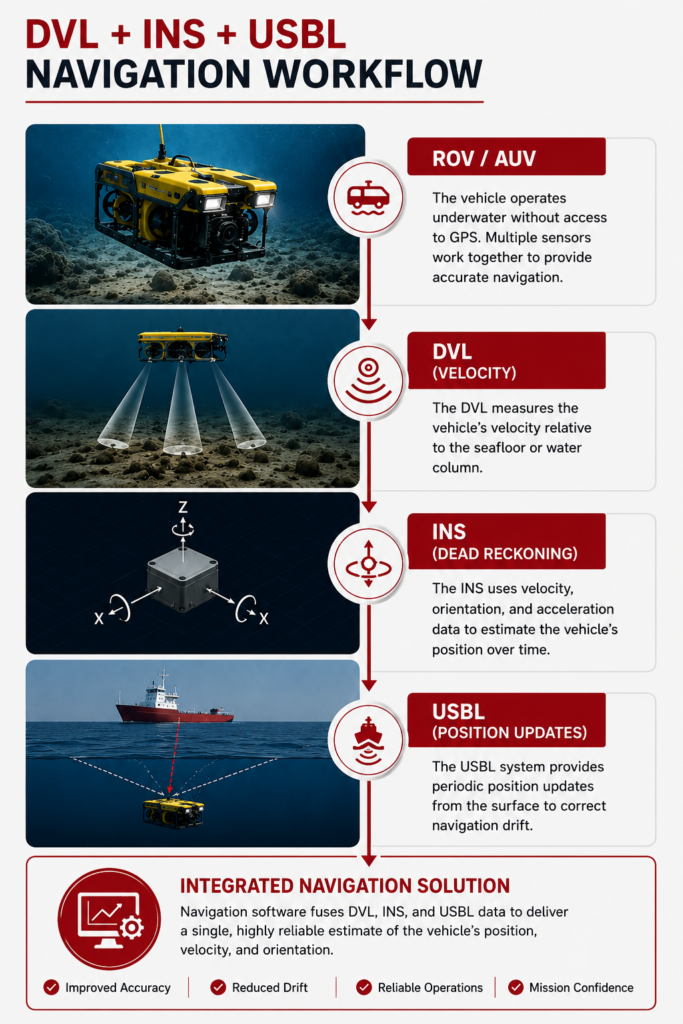
A typical offshore navigation workflow may combine:
- DVL measurements for vehicle velocity
- INS sensors for orientation and inertial calculations
- USBL or LBL systems for external position updates
- Navigation software that combines all available sensor inputs
How Does a DVL Work?
A Doppler Velocity Log works by transmitting acoustic signals into the surrounding environment and measuring how those signals change when they reflect back to the sensor.
The technology relies on the Doppler effect—the same principle used in radar systems and weather monitoring applications.
By measuring changes in the frequency of returning sound waves, a DVL can calculate how fast a vehicle is moving relative to either the seafloor or the surrounding water.
In practice, DVLs operate in several different modes depending on the mission, water depth, and whether the system can maintain contact with the seabed.
Understanding these modes is important because they directly affect navigation accuracy and determine how the DVL contributes to the overall subsea navigation workflow.
Here’s a quick overview of the three main DVL operating modes.
| Mode | Measures Relative To | Typical Use | Précision |
|---|---|---|---|
| Bottom Tracking | Seafloor | ROVs, AUVs, inspections, surveys | Highest |
| Water Tracking | Water column particles | Deepwater operations without bottom lock | Moderate |
| Altitude Measurement | Distance to seafloor | Terrain following and inspection standoff control | Situational |
Here’s more information on each of the three modes:
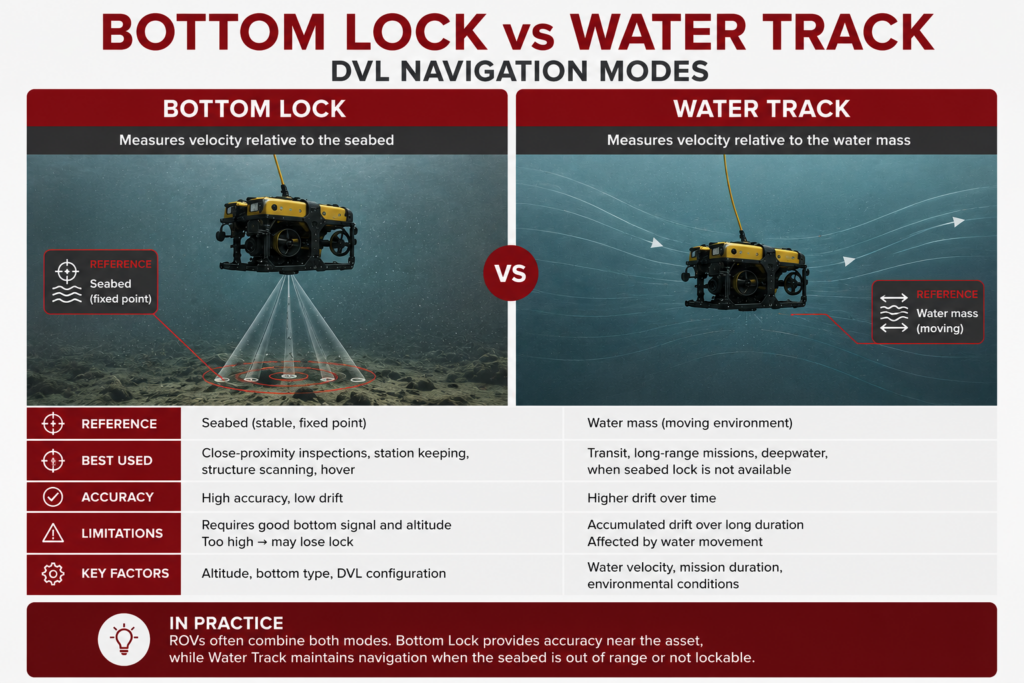
1. Bottom Tracking
In most subsea navigation applications, a DVL operates in bottom-track mode.
In this mode, the sensor sends acoustic beams toward the seafloor and measures the reflected signals. By comparing the transmitted and received frequencies, the system calculates vehicle velocity relative to the bottom.
This process is often referred to as achieving bottom lock.
When bottom lock is available, DVL systems can provide highly stable velocity measurements that support navigation, station keeping, and dead reckoning calculations. This is typically the preferred operating mode because it provides the most accurate velocity data available to the navigation system.
2. Water Tracking
When the seafloor is too far away or bottom lock can’t be maintained, some DVL systems can operate in water-track mode.
Instead of measuring movement relative to the seabed, the sensor measures movement relative to particles suspended in the water column.
Water tracking can provide useful navigation information during deepwater operations, but it’s generally less accurate than bottom tracking because water currents and changing environmental conditions can influence the measurements.
For this reason, offshore operators often treat water tracking as a fallback mode rather than a direct replacement for bottom lock.
3. Velocity, Altitude, and Dead Reckoning
A DVL’s primary purpose is velocity measurement, but many systems also provide altitude data that indicates the vehicle’s distance above the seafloor.
This information is valuable during inspection, survey, and autonomous operations where maintaining a consistent standoff distance from the seabed or an asset is important.
The velocity data generated by the DVL is commonly fed into an inertial navigation system (INS), which combines velocity, orientation, and acceleration data to estimate vehicle position through a process known as dead reckoning.
Because dead reckoning errors accumulate over time, offshore operators frequently combine DVLs with USBL, LBL, or other acoustic positioning systems that can periodically provide external position updates and correct navigation drift.
Where DVL Fits in Subsea Positioning Workflows
A DVL is rarely deployed as a standalone navigation solution.
In most offshore operations, the sensor is part of a broader subsea positioning workflow that combines multiple technologies to overcome the limitations of underwater navigation.
The reason is simple: a DVL measures movement, not absolute position.
Over time, even highly accurate velocity measurements accumulate small errors when used for dead reckoning. And eventually, those errors must be corrected using another positioning reference.
This is why modern offshore navigation systems often combine DVLs with inertial navigation systems (INS), USBL systems, LBL networks, or a combination of all three.
DVL for ROV Navigation
ROVs frequently use DVLs to improve vehicle control, station keeping, and navigation accuracy during inspections.
When an ROV is inspecting subsea infrastructure, operators need to maintain a stable position relative to the asset.
DVL measurements help the control system understand how the vehicle is moving so that it can compensate for currents and maintain precise positioning.
This becomes particularly important during close-proximity inspections, NDT workflows, intervention tasks, and survey operations where even small vehicle movements can affect data quality.
DVL for AUV Navigation
AUVs often rely even more heavily on DVL technology because they operate without a tether and without continuous operator control.
As the vehicle moves through a mission, the DVL continuously feeds velocity data into the navigation system. That information is combined with inertial measurements to estimate the vehicle’s position throughout the survey.
The longer the mission, the more important accurate DVL measurements become, because they help reduce navigation drift between external position updates.
DVL With INS, USBL, and LBL Systems
The most capable offshore navigation systems combine several technologies rather than relying on a single sensor.
A common architecture looks like this:
- DVL provides velocity measurements.
- INS provides orientation, acceleration, and navigation calculations.
- USBL or LBL provides periodic external position updates.
- Navigation software combines all available measurements into a single position estimate.
This layered approach allows operators to take advantage of each technology’s strengths while reducing the impact of individual weaknesses.
For example, a DVL can provide extremely stable velocity measurements, while a USBL system can periodically correct accumulated navigation drift.
Together, they create a navigation solution that is typically more accurate than either technology operating alone.
DVL vs USBL: What’s the Difference?
DVLs and USBL systems are often discussed together because both support subsea navigation.
But they actually solve different problems.
- A DVL measures how a vehicle is moving.
- A USBL system measures where the vehicle is located relative to a known reference point.
Understanding this difference is critical when designing a navigation workflow because the two technologies are complementary rather than competitive.
Here’s a breakdown of the key differences:
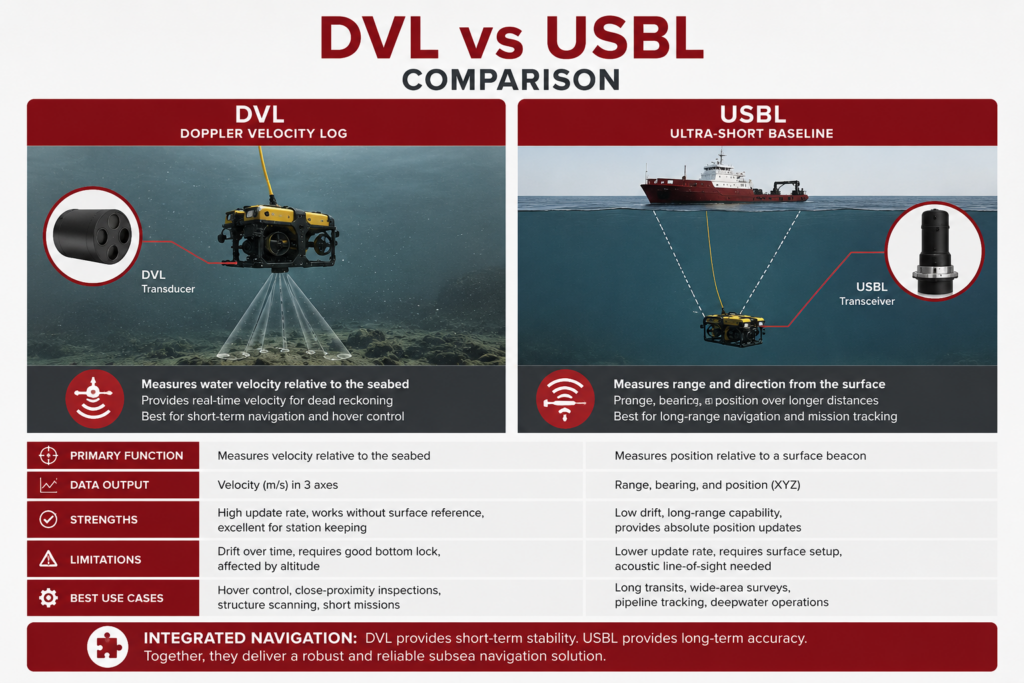
| Characteristic | DVL | USBL |
|---|---|---|
| Primary Function | Measures vehicle velocity | Measures vehicle position |
| Reference | Seafloor or water column | Surface transceiver and transponder |
| Typical Output | Speed and direction | Position coordinates |
| Primary Use | Navigation and station keeping | Tracking and positioning |
| Commonly Combined With | INS, USBL, LBL | DVL, INS |
The table above highlights why many offshore operators deploy both technologies together.
The two provide different information, and each can help compensate the limitations of the other.
For example, an ROV inspection may use a DVL to maintain stable vehicle movement near an asset while simultaneously receiving USBL position updates from the surface.
As a rule, if your primary question is “How is the vehicle moving?” a DVL is part of the answer.
If your primary question is “Where is the vehicle?” then USBL, LBL, or another positioning technology will usually be required as well.
When to Use a DVL
DVLs are most valuable when operators need reliable navigation information between external position updates.
Because the technology continuously measures vehicle movement, it helps improve navigation stability, reduce dead reckoning drift, and support precise vehicle control in environments where GPS is unavailable.
Whether a DVL belongs in your workflow depends largely on the mission profile, vehicle type, and navigation requirements.
ROV Station Keeping and Control
One of the most common uses for a DVL is helping ROVs maintain a stable position near an asset.
During subsea inspections, intervention work, and survey operations, vehicle movement caused by currents can make it difficult to collect consistent data.
DVL measurements allow the vehicle control system to understand how the ROV is moving relative to the seafloor and make adjustments accordingly.
This can improve inspection quality, reduce operator workload, and support more repeatable operations around pipelines, structures, manifolds, and other subsea assets.
AUV Navigation and Survey Lines
AUVs often rely on DVLs throughout an entire mission.
Because these vehicles operate independently, they need a reliable source of velocity data to estimate their position between external navigation updates.
DVLs help maintain navigation accuracy during hydrographic surveys, offshore mapping projects, environmental monitoring missions, and infrastructure inspections where the vehicle may travel long distances underwater.
The longer the mission duration, the greater the value of high-quality velocity measurements that can reduce accumulated navigation error.
Navigation Support Where GPS Is Unavailable
Any underwater mission immediately loses access to satellite navigation signals.
This creates a navigation challenge that DVLs help address by providing continuous movement data regardless of whether the vehicle is operating near the surface or at depth.
That said, most operators should view a DVL as part of a larger navigation solution rather than a standalone answer to underwater positioning.
4 DVL Limitations To Know
DVLs are powerful navigation tools, but like any subsea technology, they perform best under certain conditions.
Understanding these limitations helps operators design more reliable navigation workflows and avoid unrealistic expectations during offshore operations.
1. Bottom Lock and Altitude
Most DVLs deliver their best performance when they can maintain bottom lock.
Bottom lock occurs when the acoustic beams successfully reach the seafloor and return a usable signal to the sensor.
If the vehicle climbs beyond the DVL’s operational range or the seafloor becomes difficult to detect, the system may lose bottom lock and transition to water-track mode or stop providing useful measurements altogether.
This makes operating altitude an important consideration when selecting a DVL and planning a mission.
2. Seafloor Conditions
The quality of acoustic returns can vary depending on the seabed itself.
Hard surfaces often produce strong returns, while soft sediments, irregular terrain, vegetation, or highly variable bottom conditions may affect signal quality.
Most modern DVL systems are designed to operate across a wide range of environments, but seafloor conditions can still influence overall navigation performance.
This is one reason offshore operators often validate navigation performance during mission planning and sea trials.
3. Mounting and Integration
A DVL is only one component within a larger navigation system.
Installation location, vehicle geometry, calibration procedures, and integration with other navigation sensors can all affect the quality of the resulting navigation solution.
Even a highly capable DVL may deliver poor results if the overall navigation architecture is not properly configured.
For this reason, system integration is often just as important as the DVL itself.
4. Drift and External Position Updates
Although DVLs help reduce navigation drift, they do not eliminate it entirely.
Any navigation system that relies on dead reckoning will gradually accumulate error over time.
The rate of drift depends on factors such as sensor quality, mission duration, environmental conditions, and overall navigation system design.
This is why many offshore operators periodically update navigation solutions using USBL, LBL, surface references, or other external positioning systems.
Choosing the Right DVL Workflow
Choosing a DVL is rarely just about choosing a DVL.
In most offshore operations, the more important decision is determining how the DVL fits within the overall navigation architecture.
A sensor that performs well on a small inspection ROV may not be the right fit for a long-duration AUV survey mission, and vice versa.
Before evaluating specific systems, start by defining the operational requirements of the mission:
| Consideration | Why It Matters |
|---|---|
| Vehicle Type | Determines size, weight, power, and integration requirements. |
| Operating Depth | Influences sensor selection and bottom-lock performance. |
| Mission Duration | Longer missions increase the importance of drift management. |
| Positioning Accuracy | Determines whether USBL, LBL, or additional systems are required. |
| Autonomy Requirements | Higher autonomy generally requires tighter sensor integration. |
For many ROV inspection programs, a DVL combined with vehicle sensors and periodic position updates may provide sufficient navigation performance.
For longer-duration AUV missions, operators often combine DVLs with INS systems and acoustic positioning technologies to reduce drift and improve overall navigation confidence.
The key is to evaluate the navigation workflow as a complete system rather than selecting individual components in isolation.
DVL FAQs
Here are answers to some of the most commonly asked questions about DVLs and how they fit into subsea operations.
What does DVL stand for?
DVL stands for Doppler Velocity Log. It is an underwater navigation sensor that measures a vehicle’s velocity relative to the seafloor or surrounding water.
Is a DVL a positioning system?
Not by itself. A DVL measures velocity rather than absolute position. It is commonly integrated with INS, USBL, LBL, and other navigation technologies to support complete positioning workflows.
Do ROVs need a DVL?
Not every ROV requires a DVL, but many inspection, survey, and intervention ROVs use one to improve station keeping, navigation accuracy, and vehicle control. The need depends on mission complexity and positioning requirements.
What is the difference between DVL and INS?
A DVL measures vehicle movement relative to the seafloor or water column. An INS uses accelerometers and gyroscopes to estimate position, orientation, and movement. The two technologies are commonly integrated because they complement each other’s strengths.
What is bottom lock?
Bottom lock occurs when a DVL successfully tracks the seafloor and uses reflected acoustic signals to calculate vehicle velocity. Most DVL systems achieve their highest navigation performance when bottom lock is maintained.
Can a DVL work without bottom lock?
Some DVL systems can operate in water-track mode, which measures movement relative to particles in the water column. However, bottom tracking is generally preferred because it typically provides more stable navigation data.
Why are DVLs often used with USBL systems?
DVLs and USBL systems provide different information. A DVL measures movement, while a USBL system provides position updates. Combining the two helps reduce navigation drift and improve overall subsea positioning performance.