
Offshore Resources / Underwater GPS Explained: How Positioning Works Below the Surface
Guide
Underwater GPS Explained: How Positioning Works Below the Surface
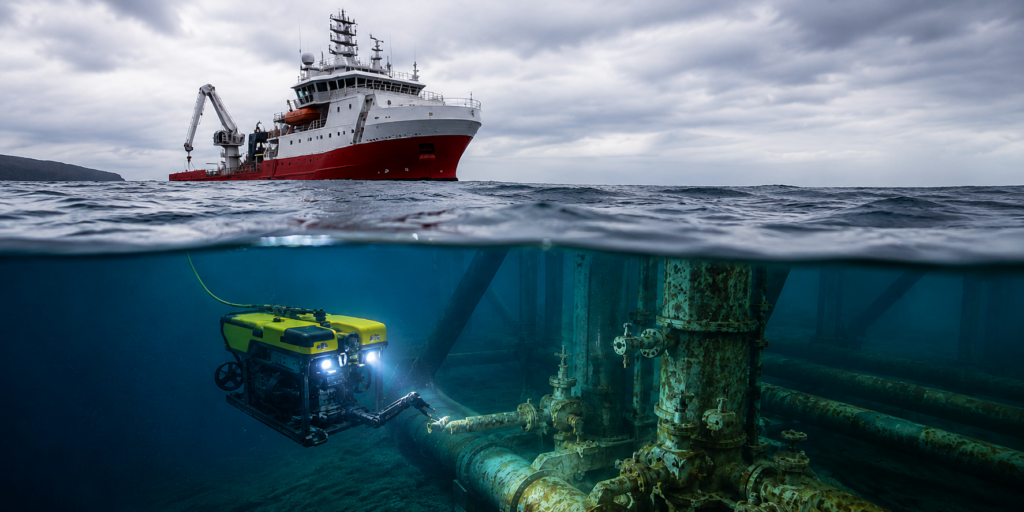
Underwater GPS is a commonly used term for technologies that help determine the location of vehicles, divers, sensors, and other assets beneath the water’s surface.
But the name is somewhat misleading, because GPS doesn’t actually work underwater.
So when people refer to an “underwater GPS system,” they’re usually talking about a subsea positioning system that combines technologies like acoustic positioning, Doppler Velocity Logs (DVLs), inertial navigation systems (INS), and surface GNSS receivers.
The goal is similar to GPS on land: determine where an asset is located.
The difference is how that position is calculated.
In this guide to underwater GPS, we’ll cover the technology that helps with location underwater, how it works, and how to find the right underwater GPS tools for your operation.
What Is Underwater GPS?
Underwater GPS is a commonly used term for technologies that help determine the location of vehicles, divers, sensors, and other assets beneath the water’s surface.
But the name is misleading, since GPS doesn’t actually work underwater.
Once a vehicle or diver submerges, satellite signals are rapidly absorbed by the water column and can no longer provide reliable positioning information.
But underwater positioning systems can function as an underwater GPS, using acoustic signals, motion sensors, velocity measurements, and surface references to estimate location below the surface.
The best underwater positioning workflow depends on the specific mission.
For example , a commercial diver tracking operation may use a very different positioning architecture than a deepwater AUV survey or an ROV inspection program.
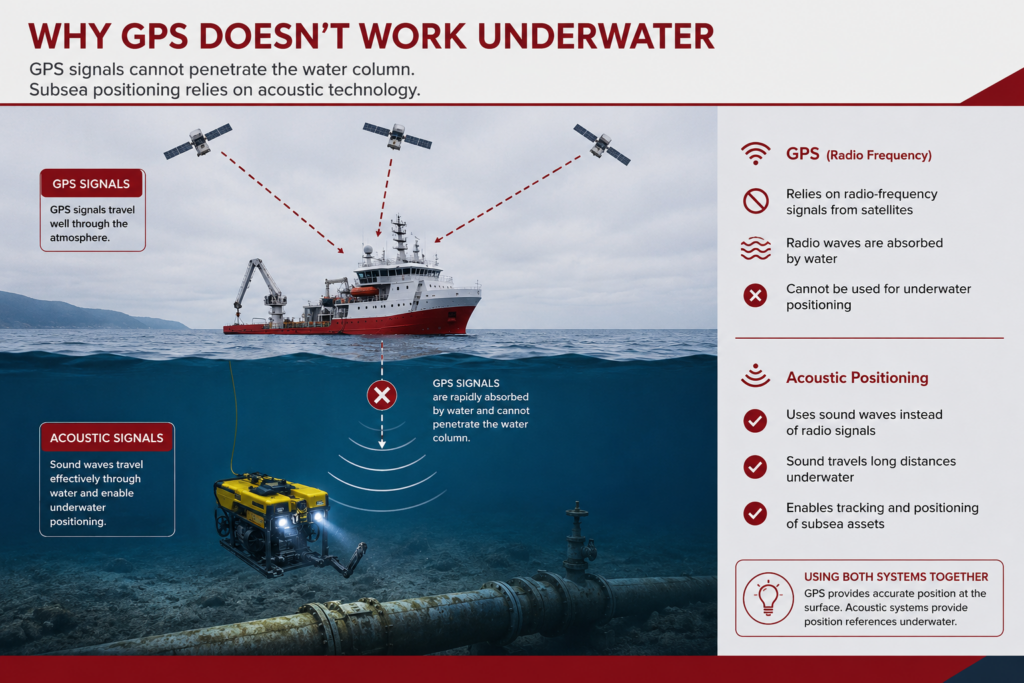
Does GPS Work Underwater?
In practical terms, no.
GPS and other GNSS systems rely on radio-frequency signals transmitted from satellites orbiting the Earth. Those signals travel extremely well through the atmosphere but are rapidly absorbed by water.
As a result, a GPS receiver that functions perfectly at the surface may lose its satellite connection almost immediately after submersion.
This creates a significant challenge for offshore and subsea operations.
ROVs, AUVs, divers, and subsea sensors all need reliable location information, but they operate in environments where direct satellite positioning is unavailable.
That challenge is one of the primary reasons underwater positioning technologies were developed.
Rather than attempting to communicate directly with satellites, these systems use methods that function effectively underwater, most commonly acoustic positioning.
Acoustic signals travel through water much more effectively than radio-frequency signals, allowing operators to determine the location of underwater assets, even when GPS doesn’t work.
This is why many offshore underwater navigation workflows use GPS and underwater positioning together rather than choosing one or the other:
- GPS establishes position at the surface.
- Underwater positioning technologies take over once the asset enters the water.
How Underwater GPS Works in Practice
In most offshore operations, “underwater GPS” refers to a host of technologies working together to get reliable locational data.
The exact architecture varies by mission, but the overall objective remains the same: maintain an accurate estimate of asset location throughout the operation.
For a short-duration ROV inspection, that workflow may be relatively simple.
For a deepwater AUV mission or hydrographic survey, it may involve multiple positioning systems working together to improve reliability and reduce navigational drift.
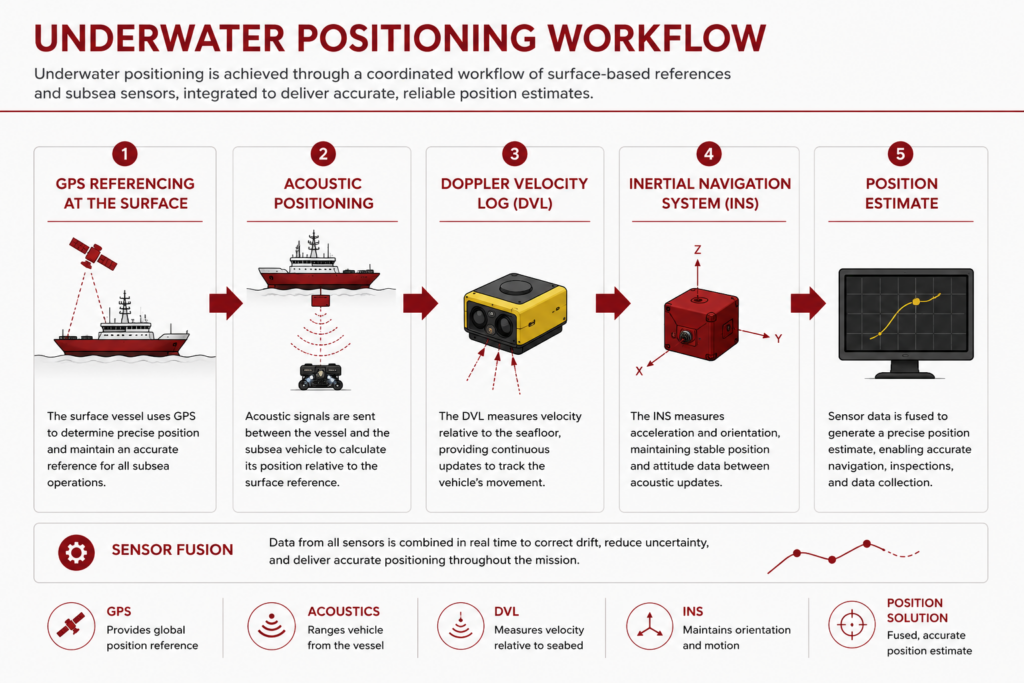
The process typically begins at the surface, where a vessel uses GPS or another GNSS receiver to establish its location.
Once an asset enters the water, other technologies take over.
Surface GPS Provides the Starting Reference
Although GPS doesn’t work underwater, it still plays an important role in subsea positioning.
Most offshore positioning workflows begin with a vessel, buoy, or surface platform whose location is known through GPS.
In a typical subsea positioning workflow, surface GPS provides:
- A known starting position
- A reference point for underwater calculations
- Location data for vessels and support platforms
- The foundation for the overall positioning solution
That surface position becomes the reference point from which underwater position estimates are calculated.
Without an accurate surface reference, it’s much more difficult to determine the location of submerged assets relative to the rest of the operation.
Acoustic Positioning Tracks the Underwater Asset
Once an asset is underwater, acoustic positioning systems often provide the primary location reference.
These systems use sound signals to determine the position of ROVs, AUVs, divers, sensors, and other subsea equipment.
Depending on the mission requirements, acoustic positioning systems can provide:
- Real-time underwater asset tracking
- ROV and AUV navigation support
- Diver tracking capabilities
- Position updates where GPS is unavailable
The details vary between systems, but the goal remains the same: establish a reliable underwater position reference when GPS is unavailable.
[AUVs and ROVs are both UUVs (Unmanned Underwater Vehicles)—Learn More in This In-Depth Guide]
DVL and INS Help Maintain Navigation Between Position Updates
Many modern subsea navigation workflows incorporate additional technologies that improve positioning performance.
A Doppler Velocity Log (DVL) measures vehicle movement relative to the seabed or surrounding water, while an inertial navigation system (INS) tracks motion and orientation using onboard sensors.
Together, these technologies help:
- Estimate movement between position fixes
- Reduce navigational drift
- Maintain situational awareness during long missions
- Improve overall navigation accuracy
This becomes particularly valuable during long missions where maintaining continuous situational awareness is important.
Rather than relying on a single position source, operators can combine multiple measurements to create a more robust navigation solution.
Positioning Software Combines Multiple Data Sources
The final position estimate is often produced through sensor fusion.
Navigation software combines information from GPS, acoustic positioning systems, DVLs, INS platforms, and other sensors to calculate the most reliable estimate of asset location.
Positioning software typically performs four key functions:
- Combines data from multiple sensors
- Filters and validates incoming measurements
- Calculates the most reliable position estimate
- Presents navigation data to operators in real time
This is one reason the term “underwater GPS” can be misleading.
The positioning solution is rarely a single device. Instead, it’s usually the result of multiple technologies working together within a larger subsea navigation workflow.

Common Types of Underwater Positioning Systems
When people search for underwater GPS, they’re often looking for one of several different positioning technologies.
The right choice depends on the mission, required accuracy, operational range, deployment constraints, and vehicle type.
Rather than see these technologies as competing with each other, they’re actually complementary tools within the broader subsea positioning ecosystem.
Here are the most common types of underwater GPS systems:
| Technology | How It Works | Common Applications | Key Advantage |
|---|---|---|---|
| USBL | Tracks an underwater transponder from a vessel-mounted acoustic system | ROV inspections, diver tracking, search & recovery | Fast deployment |
| LBL | Uses multiple seabed reference transponders | Hydrographic surveys, deepwater AUV missions | High positional accuracy |
| SBL | Uses multiple vessel-mounted acoustic receivers | Specialized tracking and support operations | Flexible vessel-based deployment |
| DVL | Measures vehicle velocity relative to the seabed or water column | AUV navigation, advanced ROV operations | Reduces navigation drift |
| Hybrid Systems | Combines multiple positioning technologies | Complex offshore inspections and long-duration missions | Improved reliability and accuracy |
Keep reading for a deeper dive into each type of system.
USBL Systems
Ultra-Short Baseline (USBL) systems are among the most widely used underwater positioning technologies in offshore inspection and intervention work.
A vessel-mounted acoustic system communicates with a transponder attached to the underwater asset, allowing operators to track its location relative to the vessel.
USBL systems are often favored because they can be deployed quickly and support a wide range of operations, including ROV inspections, diver tracking, construction support, and search-and-recovery missions.
LBL Systems
Long Baseline (LBL) systems use multiple acoustic reference points positioned on the seafloor around the work area.
Because the reference network is fixed underwater, LBL systems are often selected when positioning accuracy is the primary objective.
They’re commonly associated with hydrographic surveys, scientific research programs, deepwater operations, and long-duration autonomous missions.
The tradeoff is deployment complexity, since the seabed network must be installed and calibrated before work begins.
SBL Systems
Short Baseline (SBL) systems use multiple receivers mounted on a vessel or platform to estimate the position of underwater assets.
They occupy a middle ground between USBL and LBL architectures and remain useful in certain tracking and support applications.
Although less common than USBL in many offshore inspection workflows, SBL systems continue to serve specialized positioning requirements.
DVL-Based Navigation Systems
A DVL is not an acoustic positioning system in the same sense as USBL or LBL.
Instead, it measures vehicle movement relative to the seabed or surrounding water.
That information can be used to estimate location and reduce navigational drift between position updates.
DVLs are frequently integrated into larger subsea navigation architectures and are particularly common in AUV and advanced ROV operations.
Hybrid Navigation Architectures
Many modern subsea operations combine multiple positioning technologies.
A typical workflow may use GPS at the surface, acoustic positioning underwater, DVL measurements for velocity tracking, and an INS for motion estimation.
This layered approach helps improve reliability while reducing the limitations associated with any individual positioning method.
For that reason, many offshore operators no longer evaluate underwater positioning technologies in isolation. Instead, they design navigation workflows that combine multiple systems to meet the operational requirements of the mission.
How to Choose the Right Underwater GPS Workflow
For many operators, the first question is simple: What are you trying to track?
A short-duration ROV inspection has different positioning requirements than a long-range AUV survey. Diver tracking presents different challenges than hydrographic mapping.
The goal is to select the positioning workflow that aligns with the operational requirements of the project.
Here’s how subsea operators typically navigate finding the right workflow for their needs:
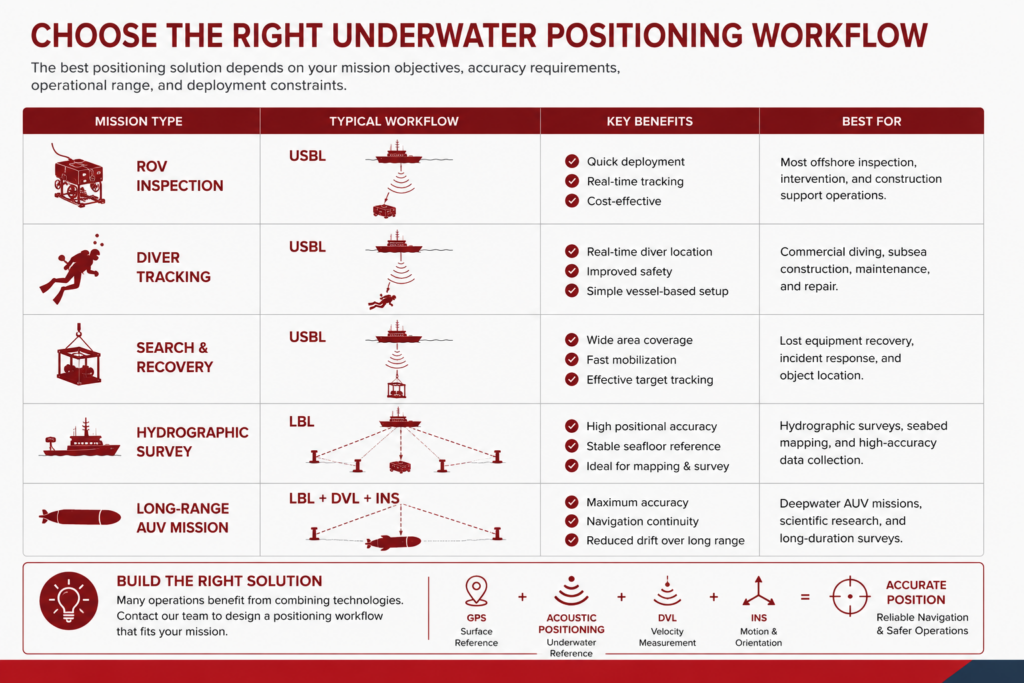
Mission type is often the starting point when selecting an underwater positioning solution, but it’s rarely the only consideration.
Here are the four most important factors to consider:
1. Mission Type
The first question is simple: what are you trying to track?
A short-duration ROV inspection has different positioning requirements than a long-range AUV survey. Diver tracking presents different challenges than hydrographic mapping. In many cases, the mission itself narrows the field considerably.
2. Required Accuracy
Accuracy requirements can be equally important.
If the project requires highly precise positioning for autonomous navigation, scientific research, or detailed survey work, a more sophisticated positioning architecture may justify additional deployment effort.
For many inspection and intervention projects, operational efficiency becomes the higher priority. In those situations, a vessel-based USBL workflow often provides a practical balance between positioning performance and mobilization complexity.
3. Deployment Requirements
Deployment considerations should be evaluated early in the planning process.
A USBL system can often be mobilized quickly and integrated into an offshore operation with relatively little setup. LBL systems generally require seabed infrastructure, calibration procedures, and additional vessel time before work can begin.
The most accurate solution is not always the most practical solution.
4. Integration With the Overall Navigation Workflow
Finally, consider how the positioning system fits into the broader navigation architecture.
Many offshore operators are not choosing between acoustic positioning and DVLs or acoustic positioning and INS platforms. Instead, they are determining how these technologies should work together.
The most effective subsea positioning programs typically begin with operational requirements and then build the navigation architecture around those requirements. That approach helps avoid both under-specifying and overcomplicating the solution.
Underwater GPS vs. Acoustic Positioning vs. DVL
Many people researching underwater GPS eventually encounter terms like acoustic positioning, USBL, DVL, and inertial navigation.
At first glance, these technologies can appear to solve the same problem.
In reality, they perform different—and often complementary—roles within a subsea navigation workflow.
This table summarizes the primary function of each technology:
| Technology | Primary Function | Works Underwater? |
|---|---|---|
| GPS / GNSS | Provides absolute position at the surface | No |
| Acoustic Positioning | Provides underwater position references | Yes |
| DVL | Measures vehicle velocity relative to the seabed or water column | Yes |
| INS | Tracks motion and orientation between position updates | Yes |
GPS establishes where a vessel or surface platform is located.
Once an asset goes underwater, acoustic positioning systems provide underwater position references that help determine where that asset is relative to known locations.
A DVL serves a different purpose.
Rather than determining position directly, it measures movement. That information helps estimate how far a vehicle has traveled and reduces navigation drift between position updates.
An INS contributes another layer by tracking motion and orientation using onboard sensors.
The reason these technologies are frequently discussed together is that many offshore operations use all of them.
- GPS establishes the surface reference.
- Acoustic positioning establishes underwater references.
- DVLs estimate movement.
- INS platforms track motion between updates.
Together, they create a navigation solution that is far more robust than any individual technology could provide.
Where Underwater GPS Fits in a Subsea Positioning Workflow
The term “underwater GPS” is useful because it describes the problem people are trying to solve.
The challenge is straightforward: determine where an underwater asset is located when satellite signals are unavailable.
The solution, however, is rarely a single technology.
Most offshore positioning programs rely on a combination of GPS, acoustic positioning systems, DVLs, inertial navigation systems, and navigation software working together to create a reliable estimate of asset location.
A Surface-to-Seafloor Positioning Workflow
A typical subsea positioning workflow begins at the surface and then extends the position reference underwater.
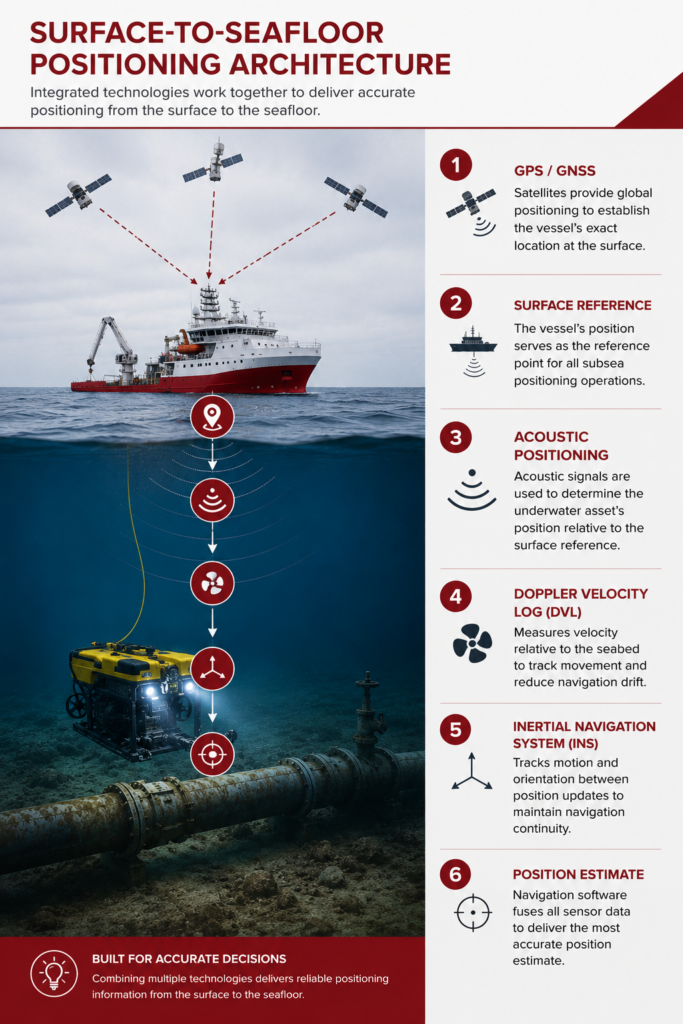
Each technology plays a different role in that chain:
- GPS / GNSS establishes the vessel’s position at the surface.
- Surface vessel reference data provides the foundation for subsea tracking.
- Acoustic positioning determines the underwater asset’s position relative to the vessel or a known reference network.
- DVLs measure vehicle movement relative to the seabed or water column.
- INS platforms track motion and orientation between position updates.
- Navigation software fuses sensor inputs into a usable position estimate.
This is why underwater positioning is better understood as a workflow than as a single device.
GPS supports the operation from the surface, while acoustic systems, DVLs, INS platforms, and software maintain positioning once the asset is below the waterline.
The Right Architecture Depends on the Mission
The exact architecture varies from project to project.
A short-duration ROV inspection may rely primarily on USBL positioning and vessel navigation data. A deepwater AUV mission may combine LBL positioning, DVL measurements, INS navigation, and additional sensors to maintain accuracy over long distances.
In practice, the workflow depends on factors such as:
- asset type
- water depth
- required positional accuracy
- mission duration
- vessel setup
- whether the asset is tethered or autonomous
- whether fixed seabed references are available
What remains consistent is the objective.
Operators need reliable location information in an environment where GPS alone cannot provide it.
That requirement is what drives the continued development of underwater positioning technologies and the increasingly sophisticated navigation architectures used throughout the offshore industry.
If you’re evaluating subsea navigation technologies more broadly, our subsea positioning guide provides a higher-level overview of how acoustic positioning, USBL, DVL, INS, GNSS, and related technologies fit together within offshore operations.
Underwater GPS FAQs
Here are answers to the most commonly asked questions about underwater GPS.
What is underwater GPS?
Underwater GPS is a commonly used term for technologies that help determine the location of vehicles, divers, sensors, and other assets below the water’s surface. In practice, it usually refers to acoustic positioning systems and related subsea navigation technologies rather than GPS itself.
Does GPS work underwater?
No. GPS signals are rapidly absorbed by water and cannot reliably penetrate the water column. Underwater operations typically rely on acoustic positioning systems, DVLs, inertial navigation systems, and other technologies instead.
What is used instead of GPS underwater?
Most underwater positioning workflows use acoustic positioning systems such as USBL, LBL, or SBL. Many operations also integrate DVLs and inertial navigation systems to improve navigation performance and reduce drift.
What is the difference between underwater GPS and acoustic positioning?
Underwater GPS is an informal term commonly used to describe underwater positioning technologies. Acoustic positioning is one of the primary technologies used to determine location underwater and is often what people actually mean when they refer to underwater GPS.
What is the most common underwater positioning system for ROVs?
USBL systems are among the most commonly used positioning technologies for ROV inspections because they provide useful positioning information while remaining relatively simple to deploy.
Do DVLs replace acoustic positioning systems?
Generally, no.
DVLs and acoustic positioning systems serve different purposes. A DVL measures vehicle movement relative to the seabed or water column, while acoustic positioning systems provide underwater position references. Many navigation architectures use both technologies together.
Can underwater positioning systems be used for diver tracking?
Yes.
Acoustic positioning systems are commonly used to track commercial divers during offshore construction, inspection, salvage, scientific diving, and search-and-recovery operations.
What technologies are used in modern subsea navigation systems?
Modern subsea navigation systems often combine GPS, acoustic positioning systems, DVLs, inertial navigation systems, and navigation software. These technologies work together to provide reliable positioning information in environments where GPS alone cannot operate.