

Offshore / UUVs: What Unmanned Underwater Vehicles Are and How They’re Used
Guide
UUVs: What Unmanned Underwater Vehicles Are and How They're Used
Unmanned underwater vehicles (UUVs) is a blanket term for any professional vehicle made to be operated underwater.
UUVs have become an increasingly important part of offshore inspections, hydrographic surveys, marine research, and other subsea operations.
They allow organizations to collect high-quality data in environments that may be difficult, hazardous, or impractical for divers to access while supporting everything from routine asset inspections to large-scale seabed mapping projects.
This guide explains what UUVs are, how they differ from ROVs, AUVs, and other marine robotic systems, and where each type fits within modern subsea inspection and survey workflows.
You’ll also learn how navigation systems, acoustic positioning technologies, and onboard sensors work together to support successful underwater missions, helping you understand which technologies are best suited for different offshore applications.
Let’s dive in.
What Is a UUV?
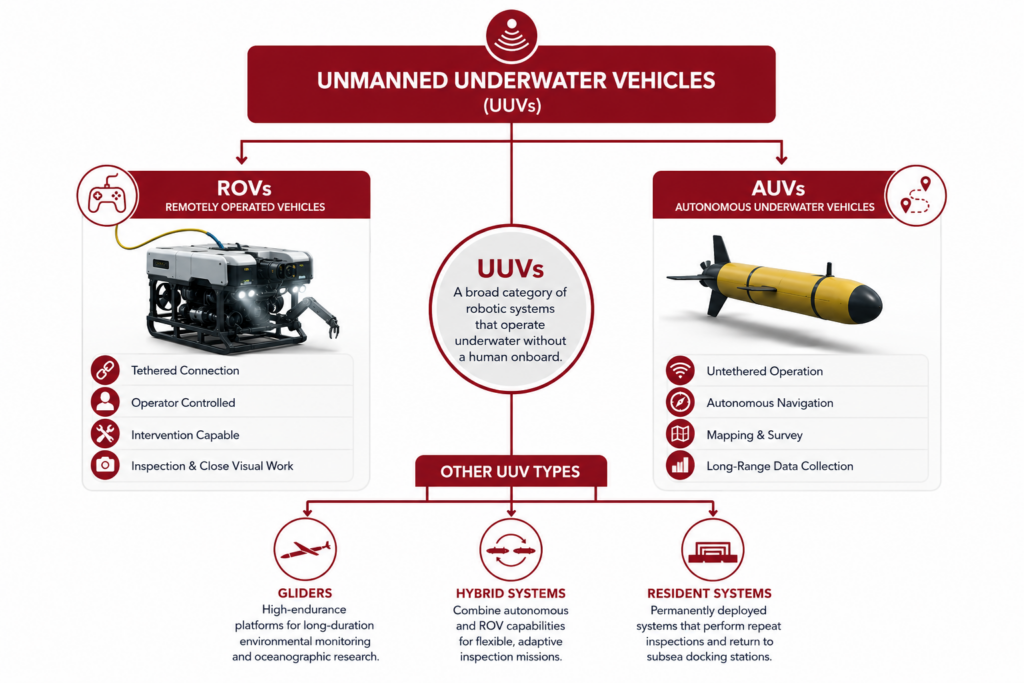
A UUV is a robotic vehicle designed to operate below the surface of the water without carrying a human onboard.
Rather than describing one specific type of robot, the term UUV refers to an entire category of underwater vehicles used for inspection, survey, mapping, research, defense, and other subsea operations.
Despite their growing use, the term UUV is often misunderstood.
Many people use it interchangeably with ROV (remotely operated vehicle) or AUV (autonomous underwater vehicle), but those are actually different types of UUVs rather than competing categories.
- ROVs remain connected to an operator through a tether that provides power, communications, and real-time control. (Only Hydromea’s EXRAY doesn’t require a tether.)
- AUVs operate without a tether, following pre-programmed missions while navigating independently beneath the surface.
The right UUV depends on the work being performed.
An offshore inspection that requires continuous video and precise operator control often favors an ROV, while a long-duration seabed survey may be better suited to an AUV capable of covering large areas autonomously.
How UUVs Are Used
Today, UUVs are used across:- Offshore oil and gas
- Offshore wind
- Marine research
- Hydrographic surveying
- Infrastructure inspection
- Environmental monitoring
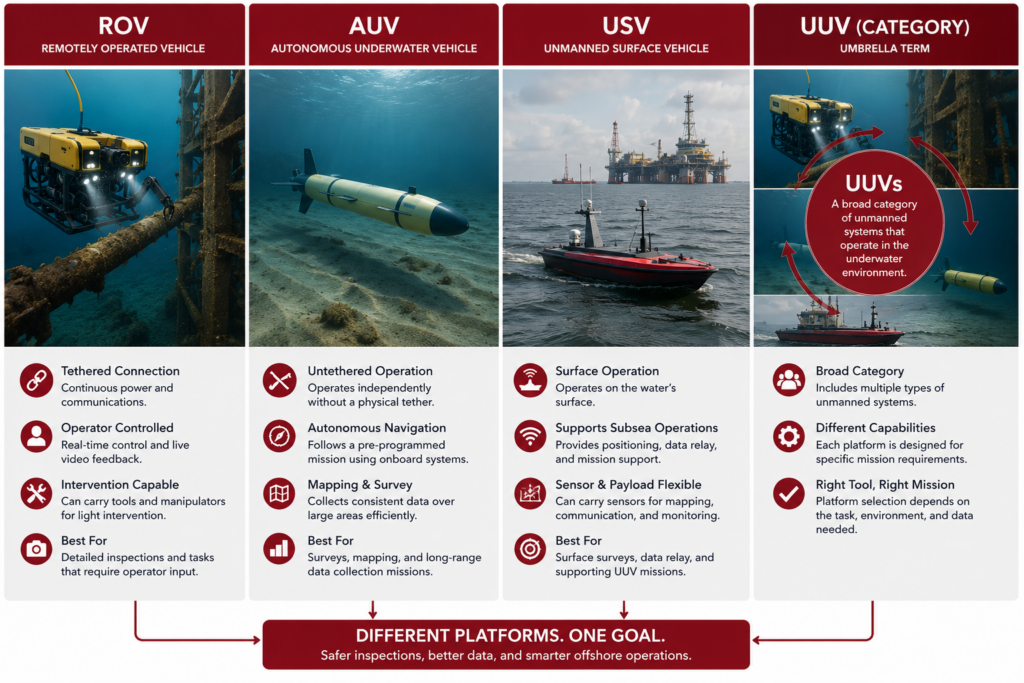
UUV vs. ROV vs. AUV vs. USV: What’s the Difference?
ROVs and AUVs are both kinds of UUVs, while USVs operate on the water’s surface rather than below it. The most important differences are:- How each vehicle is controlled
- Where it operates
- The types of missions it is designed to perform
Here’s an overview:
Choosing the right UUV depends on more than whether a vehicle is tethered or autonomous.
Mission duration, required data, water depth, positioning accuracy, communication needs, and the ability to interact with underwater assets all influence which platform is the best fit.
Here’s a closer look at each type of UUV:
ROVs: Tethered Control for Real-Time Inspection
ROVs are the most common UUV used for industrial inspection.
Because they remain connected to operators through a tether, they can transmit live video, receive continuous commands, and often carry tools for manipulating underwater equipment or performing light intervention tasks.
This makes ROVs well suited for inspections that require precise positioning, close-up visual assessments, or immediate operator decisions.
Offshore energy, ports, dams, bridges, and subsea infrastructure inspections commonly rely on ROVs because operators can react instantly to changing conditions during the mission.
AUVs: Untethered Autonomy for Survey and Mapping
AUVs complete missions without a physical tether.
Before deployment, operators program a survey plan that the vehicle follows using onboard navigation systems, inertial sensors, acoustic positioning, and other technologies that allow it to navigate underwater where GPS signals can’t reach.
Because they’re not limited by a tether, AUVs can efficiently survey large areas and collect consistent datasets over long distances. They’re commonly used for hydrographic surveys, seabed mapping, pipeline route surveys, and environmental monitoring where broad coverage is more important than continuous operator control.
USVs: Surface Vehicles That Support Underwater Missions
Although they’re not UUVs, unmanned surface vehicles (USVs) often work alongside underwater vehicles. They can transport sensors, collect surface data, provide acoustic positioning references, or serve as communication links between underwater vehicles and operators.
Modern offshore survey and inspection programs often combine USVs with UUVs to improve efficiency, reduce vessel costs, and extend operational capabilities across both surface and subsea environments.
The 5 Types of Unmanned Underwater Vehicles
Although ROVs and AUVs are the two best-known types of UUVs, they’re not the only underwater robotic platforms in use today.
Different vehicle designs have evolved to solve different operational challenges, from close-range inspections to long-duration oceanographic surveys.
Here’s an overview of the five main types:
| UUV Type | Best Fit | Primary Tradeoff |
|---|---|---|
| Inspection-Class ROV | Close visual inspection and real-time control | Limited by tether management and deployment range |
| Work-Class ROV | Inspection, tooling, intervention, and subsea repair support | Requires larger support vessels and more complex operations |
| AUV | Large-area survey, mapping, and route inspection | Less direct operator control during the mission |
| Underwater Glider | Long-duration environmental and oceanographic monitoring | Slow speed and limited fit for close inspection work |
| Hybrid or Resident System | Recurring inspection, subsea residency, and mixed-control workflows | Still application-dependent and more complex to deploy |
1. Inspection-Class ROVs
Inspection-class ROVs are compact, highly maneuverable vehicles designed to capture visual data in confined or difficult-to-access environments.
They’re commonly used when operators need:
- Live video during the inspection
- Precise vehicle control near underwater assets
- Close-up documentation of defects or areas of concern
- Access to locations that may be unsafe or impractical for divers
Many modern inspection ROVs carry high-resolution cameras, imaging sonar, lasers for measurement, and other sensors that help operators assess asset condition without sending divers into the water.
These vehicles are often used to inspect subsea structures, ship hulls, tanks, pipelines, dams, and other underwater infrastructure.
2. Work-Class ROVs
Work-class ROVs are larger, more powerful systems capable of performing intervention tasks in addition to inspection.
They’re typically used when the mission requires the vehicle to interact physically with underwater equipment.
Common capabilities include:
- Robotic manipulation
- Tool deployment
- Subsea maintenance support
- Construction and repair assistance
- Heavy sensor payload integration
These vehicles are commonly deployed from offshore vessels to support deepwater oil and gas operations, subsea construction, and other missions that require both inspection and physical interaction with equipment.
3. Autonomous Underwater Vehicles (AUVs)
AUVs operate independently after deployment, following pre-programmed missions while collecting data over large areas.
Instead of remaining connected to operators through a tether, they rely on onboard navigation systems and acoustic positioning technologies to determine their location and complete their assigned routes.
AUVs are commonly used for:
- Hydrographic surveys
- Seabed mapping
- Pipeline route surveys
- Environmental monitoring
- Large-area data collection
4. Underwater Gliders
Underwater gliders are a specialized type of AUV designed for exceptionally long-duration missions.
Rather than using continuous propeller-driven propulsion, they change buoyancy to glide slowly through the water, allowing them to operate for weeks or even months while consuming relatively little energy.
Gliders are best suited for missions that prioritize endurance over speed or close-up inspection detail, including:
- Oceanographic research
- Climate studies
- Environmental monitoring
- Long-duration water column data collection
Because they’re slow and optimized for broad data collection, gliders are generally not the right choice for industrial inspection tasks that require close visual assessment, real-time control, or physical interaction with an asset.
5. Hybrid and Resident Underwater Systems
Newer UUV designs increasingly combine characteristics from multiple vehicle types.
Some hybrid systems can operate autonomously for portions of a mission while allowing operators to assume direct control when detailed inspection is required.
Resident underwater systems take this concept further by remaining deployed underwater for extended periods.
These systems may periodically perform inspections before returning to subsea docking stations for charging, data transfer, or mission updates.
These platforms are ideal when operators need:
- More frequent inspection coverage
- Reduced vessel mobilization
- Repeatable monitoring of subsea assets
- Integration with broader asset management workflows
Although these technologies are still emerging, they point toward a future where underwater inspection becomes more continuous, autonomous, and integrated into offshore asset management programs.
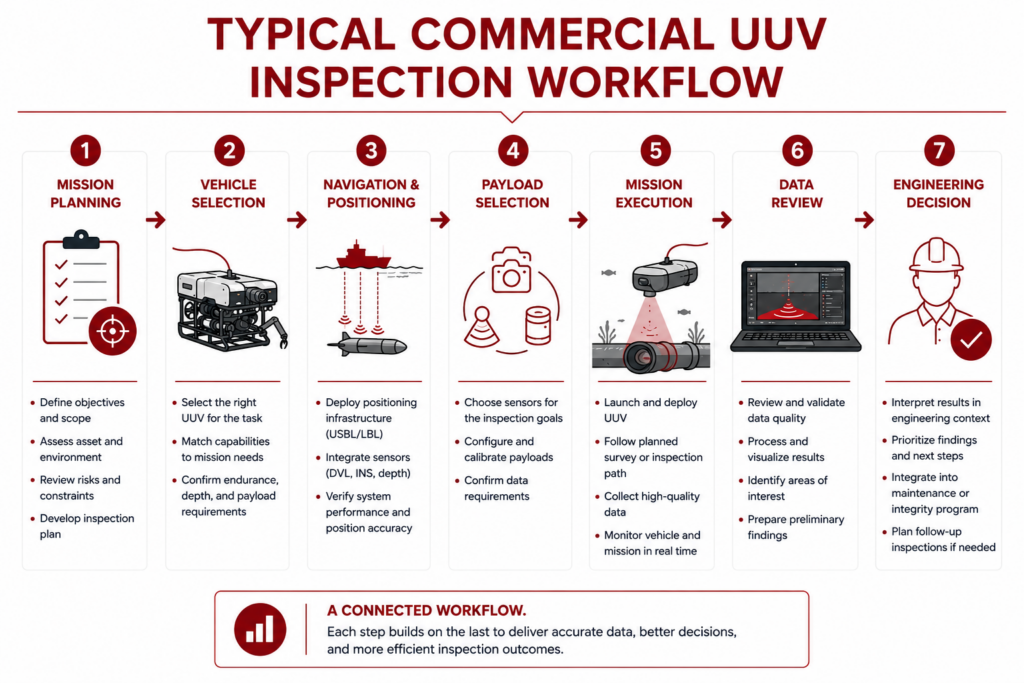
How UUVs Fit Into a Subsea Inspection Workflow
Selecting the right UUV is only the beginning of a successful underwater mission.
Whatever the objective, the vehicle must operate within a broader inspection workflow that includes navigation, subsea positioning, sensor selection, and data review.
These supporting systems determine how accurate, repeatable, and actionable the final inspection results will be. And as missions become more complex, they can be just as important as the vehicle itself.
Here’s a look at the key pieces of a subsea inspection workflow, and where UUVs fit into it:
Now, let’s go through each step in more detail.
1. Mission Planning
Every successful UUV mission begins long before the vehicle enters the water. Inspection teams first define the inspection objective, identify the asset to be inspected, review environmental conditions, and establish any operational or safety constraints.
These planning decisions influence everything that follows, from vehicle selection to sensor configuration and navigation strategy.
A well-planned mission reduces unnecessary vessel time, improves data quality, and increases the likelihood that the inspection will answer the engineering questions it was designed to address.
2. Vehicle Selection
The inspection objective should determine the vehicle—not the other way around.
Teams typically begin by defining the asset, the information they need to collect, environmental conditions, and operational constraints before choosing an ROV, AUV, or another type of UUV.
For example, inspecting a damaged subsea valve may require an ROV that can hover precisely while transmitting live video. A pipeline route survey covering several kilometers may instead call for an AUV that can efficiently collect georeferenced survey data over a much larger area.
3. Navigation and Positioning
Unlike aerial drones, UUVs can’t rely on GPS once they’re underwater.
Instead, they use combinations of inertial navigation systems, Doppler Velocity Logs (DVLs), acoustic positioning systems such as USBL or LBL, and other navigation technologies to estimate or measure their position throughout the mission.
For offshore inspections, accurate positioning is essential. It helps for key tasks including:
- Relocating defects for maintenance
- Repeating inspections over time
- Integrating inspection results into broader asset management programs
4. Payload and Sensor Selection
The same UUV can support very different missions depending on the sensors it carries.
High-resolution optical cameras support visual inspections, while sonar systems can improve imaging in turbid water. Other missions may require multibeam echo sounders, side-scan sonar, laser measurement systems, environmental sensors, or specialized scientific instruments.
Choosing the right payload is ultimately driven by the inspection objective. Collecting more data is not always better if the sensors do not produce information that supports maintenance, engineering, or operational decisions.
5. Mission Execution
With the vehicle configured and deployed, operators carry out the inspection according to the planned mission.
For ROVs, this typically involves continuous operator control using live video and sensor feedback. AUVs instead execute pre-programmed survey routes while collecting data autonomously.
Throughout the mission, teams monitor vehicle performance, navigation accuracy, and sensor health to ensure the inspection is progressing as planned.
If conditions change or unexpected findings are encountered, operators may adjust the mission to gather additional information before recovery.
6. Data Review
Once the mission is complete, inspection teams review the collected data to verify its quality and identify areas of interest.
Images, sonar data, maps, and other sensor outputs are processed, organized, and validated before engineering analysis begins.
At this stage, teams often determine whether additional data is needed.
Broad surveys may reveal locations that warrant a closer follow-up inspection using an ROV, divers, or another inspection method.
7. Engineering Decision
The inspection workflow ultimately culminates in a decision.
Engineers combine the inspection findings with asset history, maintenance records, and operational requirements to determine the appropriate next steps.
Depending on the results, the outcome may include scheduling maintenance, planning a repair, increasing monitoring frequency, or confirming that no immediate action is required.
The value of a UUV inspection isn’t simply the data it collects—it’s the confidence that data provides for making informed engineering and asset integrity decisions.
When to Use a UUV for Subsea Inspection or Survey Work
The best UUV is the one that matches the mission—not necessarily the most advanced platform available.
Before choosing a vehicle, inspection teams should consider:
- What information they need to collect
- How quickly decisions must be made
- Whether operators need continuous control throughout the mission
For many industrial inspections, the primary question is whether the work requires real-time operator involvement or efficient coverage of large underwater areas.
That distinction often determines whether an ROV or an AUV is the better choice.
Here’s a decision tree to help you find the best UUV for your specific mission:
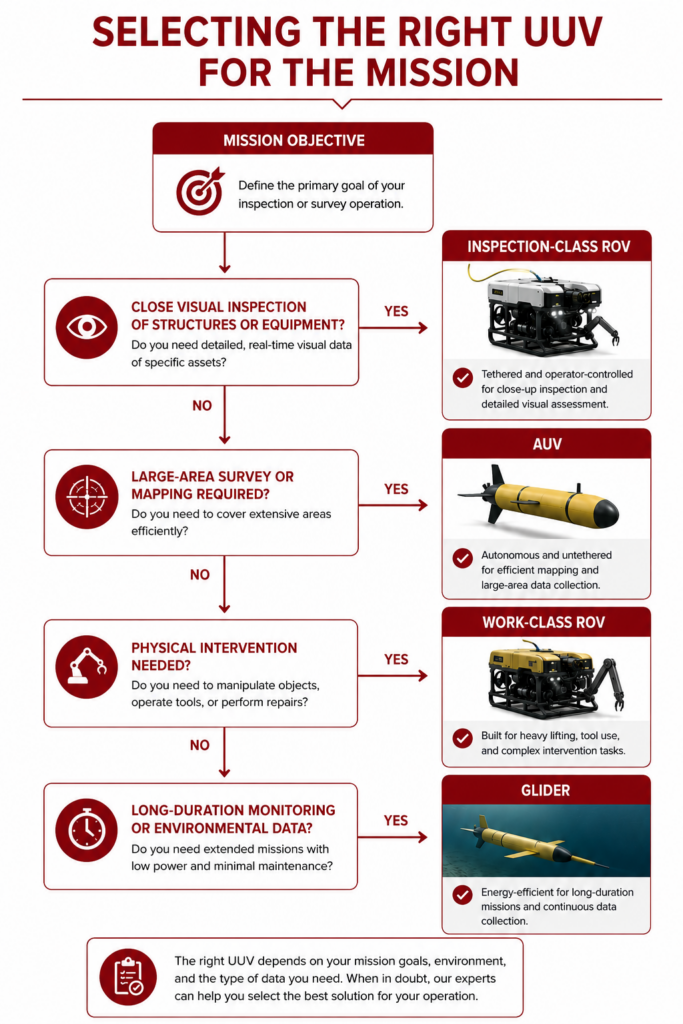
As you can see in the diagram, vehicle selection is rarely based on autonomy alone.
Water depth, currents, visibility, communications, deployment logistics, available support vessels, and sensor requirements all influence the final decision.
Many offshore operators also combine multiple UUV types within the same project, using AUVs to collect broad survey data before deploying ROVs for targeted inspection and verification.
Once you find the right underwater vehicle, the success of the mission depends on more than the platform itself. Navigation systems, acoustic positioning, onboard sensors, and inspection workflows all play a critical role in producing accurate, actionable data.
How UUV Technology Is Evolving
Commercial UUV technology continues to advance, expanding what inspection teams can accomplish underwater.
This evolution is driven by improvements in autonomy, navigation, battery performance, and sensor integration.
All of these advances are allowing operators to collect more data, inspect larger areas, and reduce the number of vessel deployments required for some missions.
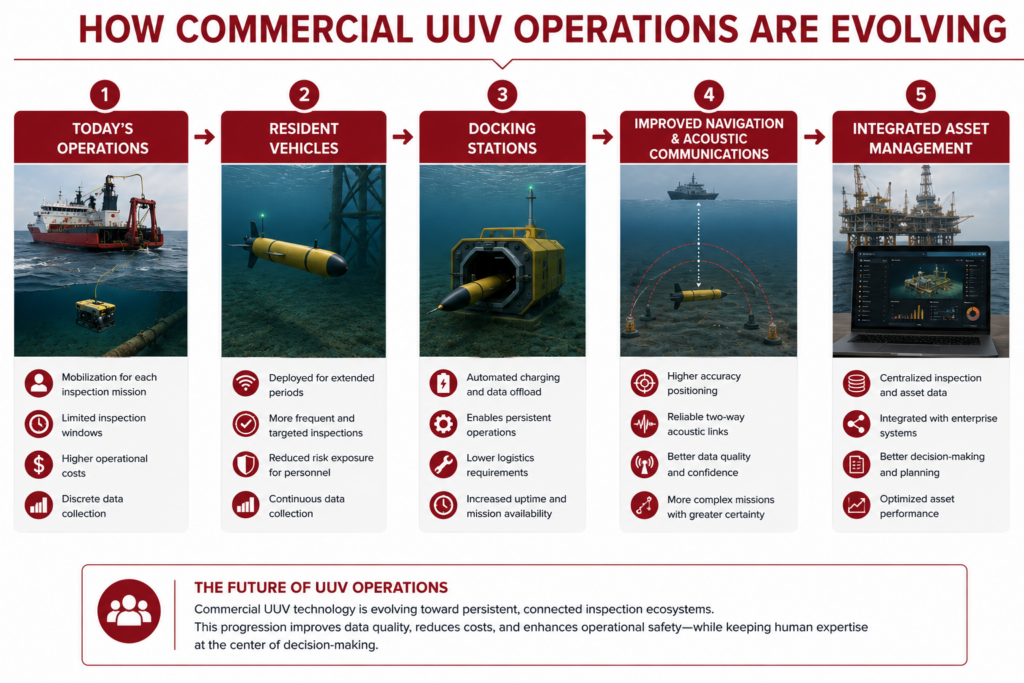
Several trends are shaping the next generation of commercial underwater operations:
- Resident underwater systems that remain deployed for extended periods and perform inspections on scheduled intervals.
- Subsea docking and charging stations that allow autonomous vehicles to recharge, transfer data, and prepare for future missions without returning to the surface after every deployment.
- Improved acoustic communications and positioning that support more reliable navigation and coordination during complex underwater operations.
- Higher-performance imaging and sensing technologies that improve inspection quality in challenging underwater environments.
- Greater integration with digital asset management systems, allowing inspection data to flow more efficiently into maintenance planning and long-term asset integrity programs.
While these technologies continue to mature, they reinforce an important principle: successful underwater inspections depend on selecting the right combination of vehicle, sensors, navigation systems, and operational workflow.
As UUV capabilities expand, the focus remains on producing reliable data that supports informed engineering and maintenance decisions.
Related Underwater Vehicle and Positioning Guides
UUVs are only one part of modern subsea inspection and survey operations. Choosing the right vehicle is important, but successful missions also depend on navigation, positioning, sensors, and mission planning.
If you’d like to explore these topics in more detail, the following guides provide a deeper look at the technologies that support commercial underwater operations:
- Underwater Drone — Learn how inspection-class ROVs are used for visual inspections and other remotely operated underwater tasks.
- Autonomous Underwater Vehicle (AUV) — Explore how untethered vehicles support large-area surveys, mapping, and environmental monitoring.
- Underwater Navigation System — Understand how underwater vehicles navigate when GPS signals are unavailable.
- Underwater GPS — Learn why traditional GPS does not work underwater and what technologies are used instead.
- Doppler Velocity Logs (DVLs) — See how DVLs help underwater vehicles estimate position and maintain accurate navigation.
- Subsea Positioning — Explore the positioning technologies used to locate underwater vehicles and assets.
- USBL — Learn how Ultra-Short Baseline systems support acoustic tracking and positioning during underwater operations.
UUV FAQs
Here are answers to commonly asked questions about unmanned underwater vehicles.
What does UUV stand for?
UUV stands for unmanned underwater vehicle. It’s a broad term that includes several types of robotic vehicles designed to operate underwater without carrying a human onboard.
Is an ROV a UUV?
Yes. A remotely operated vehicle (ROV) is one type of UUV. Unlike autonomous vehicles, ROVs remain connected to an operator through a tether that provides power, communications, and real-time control.
Is an AUV the same as a UUV?
No. An autonomous underwater vehicle (AUV) is a specific type of UUV. While every AUV is a UUV, not every UUV is an AUV.
What’s the difference between a UUV and an underwater drone?
The terms are often used interchangeably, particularly when referring to compact inspection ROVs. However, UUV is the broader technical category, while “underwater drone” is more commonly used as a general or marketing term for remotely operated inspection vehicles.
Can UUVs use GPS underwater?
No. GPS signals do not penetrate water effectively. Instead, UUVs rely on technologies like inertial navigation systems, Doppler Velocity Logs (DVLs), and acoustic positioning systems to determine their position during underwater missions.
What industries use UUVs?
Commercial UUVs are used across offshore oil and gas, offshore wind, marine construction, hydrographic surveying, scientific research, environmental monitoring, ports and harbors, defense, and other maritime industries.