
Underwater GPS Explained: How Positioning Works Below the Surface
What Is Underwater GPS?
Does GPS Work Underwater?
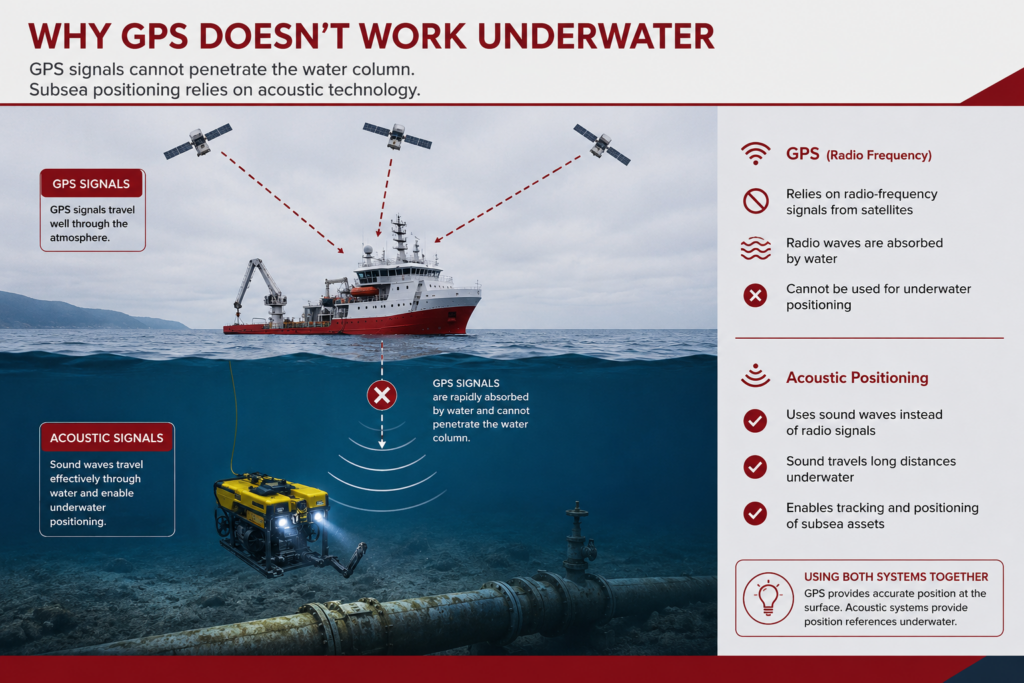
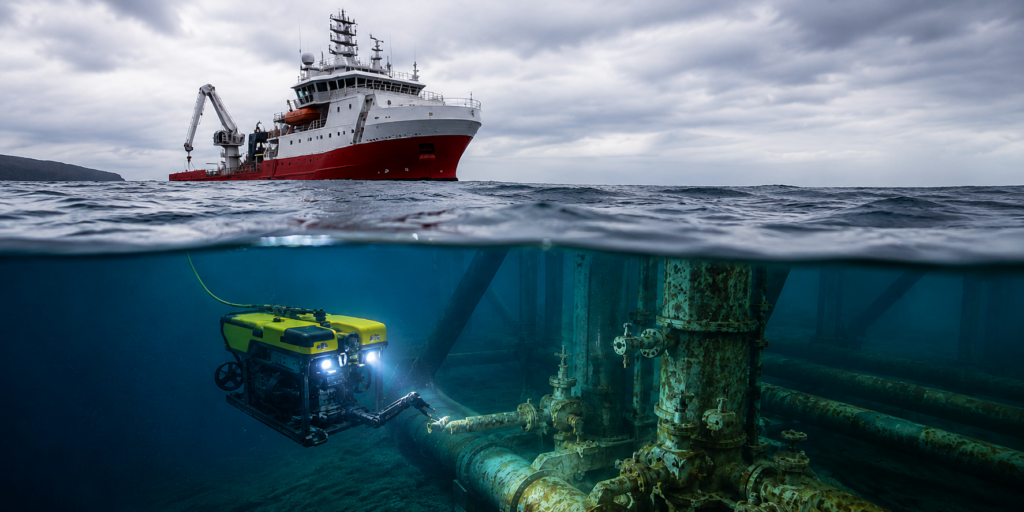
GPS establishes position at the surface. Underwater positioning technologies take over once the asset enters the water.
How Underwater GPS Works in Practice
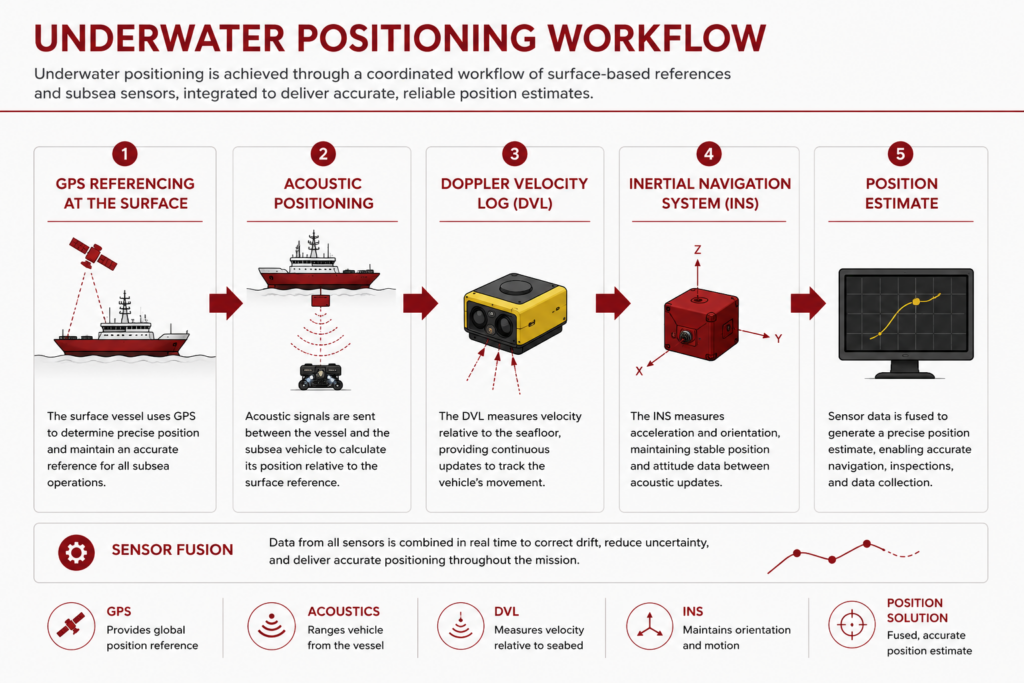
Surface GPS Provides the Starting Reference
A known starting position A reference point for underwater calculations Location data for vessels and support platforms The foundation for the overall positioning solution
Acoustic Positioning Tracks the Underwater Asset
Real-time underwater asset tracking ROV and AUV navigation support Diver tracking capabilities Position updates where GPS is unavailable
DVL and INS Help Maintain Navigation Between Position Updates
Estimate movement between position fixes Reduce navigational drift Maintain situational awareness during long missions Improve overall navigation accuracy
Positioning Software Combines Multiple Data Sources
Combines data from multiple sensors Filters and validates incoming measurements Calculates the most reliable position estimate Presents navigation data to operators in real time

Common Types of Underwater Positioning Systems
USBL Systems
LBL Systems
SBL Systems
DVL-Based Navigation Systems
Hybrid Navigation Architectures
How to Choose the Right Underwater GPS Workflow
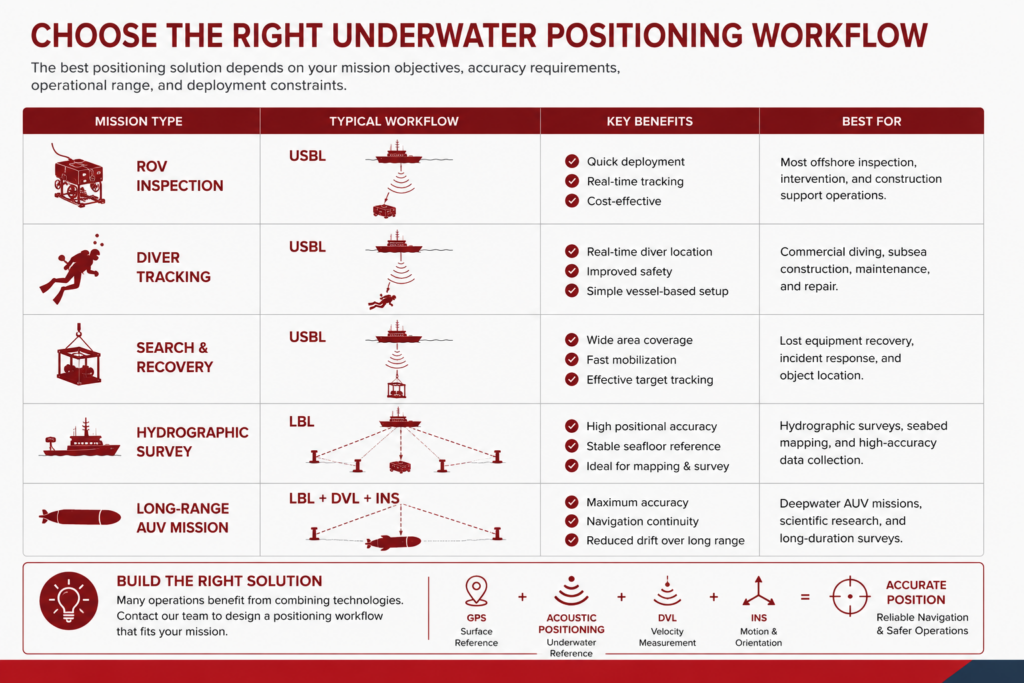
1. Mission Type
2. Required Accuracy
3. Deployment Requirements
4. Integration With the Overall Navigation Workflow
Underwater GPS vs. Acoustic Positioning vs. DVL
GPS establishes the surface reference. Acoustic positioning establishes underwater references. DVLs estimate movement. INS platforms track motion between updates.
Where Underwater GPS Fits in a Subsea Positioning Workflow
A Surface-to-Seafloor Positioning Workflow
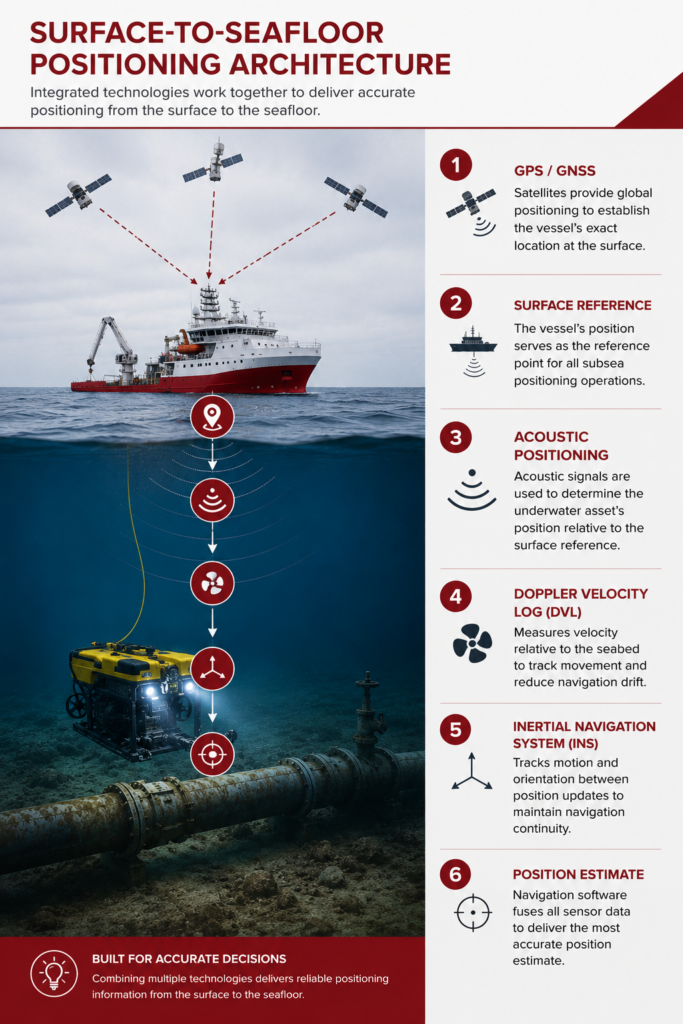
GPS / GNSS establishes the vessel’s position at the surface. Surface vessel reference data provides the foundation for subsea tracking. Acoustic positioning determines the underwater asset’s position relative to the vessel or a known reference network. DVLs measure vehicle movement relative to the seabed or water column. INS platforms track motion and orientation between position updates. Navigation software fuses sensor inputs into a usable position estimate.
The Right Architecture Depends on the Mission
asset type water depth required positional accuracy mission duration vessel setup whether the asset is tethered or autonomous whether fixed seabed references are available