

Que sont les inspections sous-marines de tunnels et d'infrastructures ?
Il existe de nombreuses structures qui traversent nos villes et qui sont invisibles pour la plupart des gens. Ces structures sont nécessaires pour acheminer les eaux usées, les eaux pluviales et l'eau potable vers et depuis les installations de traitement et les sources d'approvisionnement. Ces structures doivent être inspectées pour déterminer leur viabilité et leur état à long terme, afin de prendre des décisions éclairées en matière de réparation.
La réparation de ces structures n'est pas aussi facile que celle des bâtiments et des routes, car elles se trouvent sous de nombreuses autres structures et impliquent de nombreuses pièces mobiles pour effectuer ces réparations. Des inspections sont menées pour déterminer l'état de la structure, les niveaux de sédiments, etc.
Les inspections peuvent être effectuées par des plongeurs, par l'entrée dans un espace confiné, par excavation ou par des véhicules robotisés.
Pourquoi utiliser un ROV pour l'inspection sous-marine des infrastructures ?
Pour les inspections de conduites et de tunnels entièrement immergés, le ROV est un excellent outil. Dans certains environnements, par exemple lorsque l'eau est trouble ou que le diamètre du tunnel est important, il est difficile de se contenter d'une caméra pour effectuer une inspection approfondie.
La visibilité limitée peut rendre difficile l'identification des défauts. L'opérateur peut rapprocher le ROV des parois, du haut et du bas du tunnel afin d'obtenir une image suffisamment claire, mais cela peut nécessiter plusieurs passages et ne pas fournir les données adéquates, comme la compréhension des niveaux de sédiments dans le tunnel.
Voici quelques-uns des facteurs à prendre en compte lors du choix d'un ROV pour l'inspection d'un tunnel :
- Longueur et diamètre des tunnels. 1. Plus le diamètre est petit, plus le véhicule est petit ; 2. plus le diamètre est grand, plus il est probable que l'on ait besoin d'un sonar imageur (les lumières et la caméra seules ne fourniront pas suffisamment de contexte à l'opérateur pour effectuer des inspections approfondies) ; 3. les tunnels plus longs peuvent nécessiter des véhicules plus puissants ou des sonars imageurs pour aider à rendre l'inspection plus efficace.
- Points d'accès. 1. Taille des points d'accès (taille du véhicule) ; 2. nombre de points d'accès (longueur de l'attache nécessaire) ; 3. emplacement des points d'accès (degré de portabilité du système nécessaire).
- État du tunnel. 1. Niveaux de sédiments (les véhicules à chenilles et les véhicules nageurs sont plus performants lorsque des quantités importantes de débris se trouvent dans la canalisation) ; 2. submergés ou partiellement submergés ou vides (véhicule à chenilles ou véhicule nageur).
- Type de données requises. 1. Les inspections visuelles générales peuvent être effectuées avec une simple caméra et des lampes ; 2. les sonars permettent d'obtenir une vue d'ensemble dans les eaux troubles ; 3. les données de la jauge d'épaisseur dans les tuyaux en acier ; 4. la position dans le tuyau (USBL ne fonctionne pas, un compteur de longueur d'attache est nécessaire) ; 5. les niveaux de sédiments requièrent un sonar.
Avantages de l'utilisation d'un sonar avec un ROV pour l'inspection des infrastructures sous-marines
Ajout d'un sonar imageur au drone sous-marin permet aux opérateurs de mieux comprendre l'état du tunnel dans son ensemble et permet d'identifier les défauts suivants :
- État du tunnel. Déformation - Ovalie - Corrosion
- Taille et types de défauts. Fissures et piqûres - Effondrements - Disjointements et séparations
- Obstacles. Niveaux de sédiments, peuvent cacher des déformations, réduire les débits, augmenter le risque de débordements - Objets étrangers (matériaux de construction, racines d'arbres, tuyaux ou câbles transversaux) - Latéraux en saillie
La détection de ces défauts permet de prendre des décisions en matière de réparation. Tous les défauts ne nécessitent pas une attention immédiate. Souvent, ils deviennent des points d'intérêt pour une évaluation ultérieure. L'objectif est d'identifier les changements au fil du temps, de voir si un défaut s'aggrave rapidement ou lentement.
Si le défaut a atteint un point critique et s'aggrave, les mesures de réparation doivent être immédiates. Toutefois, et c'est tout aussi important du point de vue des coûts, le fait de pouvoir déterminer les défauts qui ne nécessitent pas d'attention permet de réduire les dépenses de réparation inutiles.
L'avantage d'un ROV facile à utiliser dans votre flotte est que le réexamen de ces défauts peut être entrepris par pratiquement n'importe quel opérateur.
Étude de cas d'un tunnel immergé - PipeTek
Dans cette vidéo, notre équipe a aidé PipeTek, une entreprise d'inspection de canalisations, à inspecter des tunnels submergés et d'autres structures pour Toronto Water.
Objectif de la mission
L'objectif de cette mission particulière était d'évaluer l'état d'un tunnel d'égout et d'orage combiné pour Toronto Water. PipeTek devait fournir un rapport sur le tunnel et les structures de pompage et de prise d'eau associées afin de déterminer les meilleures étapes à suivre pour la gestion de la structure.
Comme il s'agissait d'un tunnel de 530 m de long, entièrement immergé, le ROV REVOLUTION a été choisi pour cette tâche. Les tunnels plus longs avec des sédiments au fond se sont avérés plus difficiles à creuser pour les robots à chenilles, robots avec lesquels PipeTek avait beaucoup plus d'expérience à l'époque.
Le problème des chenillettes est que leurs roues ou leurs chenilles remuent les sédiments, obstruant ainsi la vue du tunnel. Leur champ de vision est également réduit, car leurs caméras ne peuvent s'élever qu'à une certaine distance du fond du tunnel. Il serait beaucoup trop dangereux pour l'homme de pénétrer dans un tunnel aussi long.
En utilisant un ROV à nage libre équipé d'un sonar imageur, PipeTek a pu réaliser un rapport détaillé de ces tunnels et structures.
Matériel utilisé
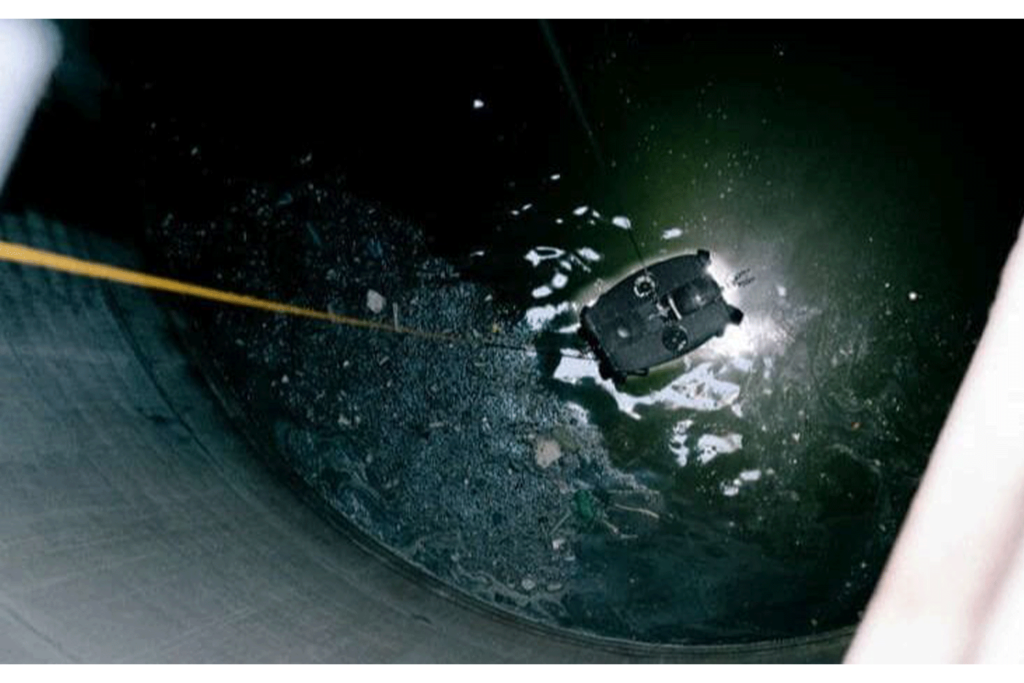
- ROV Deep Trekker REVOLUTION: Le ROV REVOLUTION est un robot sous-marin équipé d'un sonar qui permet aux opérateurs de voir, même si l'eau était si trouble que la caméra était pratiquement inutile. Le sonar a permis aux opérateurs de visualiser l'environnement autour d'eux d'une manière qui va bien au-delà de ce que l'on peut imaginer avec un sonar à balayage latéral traditionnel ou même un sonar à balayage mécanique.
- Sonar d'imagerie Blueprint Subsea Oculus M3000d Multibeam : Le "d" dans le nom du modèle de sonar M3000d signifie qu'il s'agit d'un sonar à double fréquence, ce qui vous permet de basculer entre le mode basse fréquence, haute fréquence et haute résolution, et le mode basse fréquence, qui offre une vue plus large. Le mode haute fréquence convient mieux à l'inspection de près des défauts pour des mesures précises, tandis que le mode basse fréquence est plus adapté aux vues générales du tunnel. Lors de cette inspection, il y a eu quelques passages dans le tunnel, tous deux à des vitesses élevées pour obtenir une idée générale rapide de l'état, à la recherche d'artefacts ou d'obstructions de grande taille. Les passages plus lents à haute fréquence et résolution pour se concentrer sur les petits défauts.
Interprétation des images sonar
Le ROV REVOLUTION est unique en raison de la rotation de la tête de la caméra qui fait également pivoter la tête du sonar. Lorsque vous faites pivoter votre caméra de haut en bas, le sonar pivote également de haut en bas. Sur cette image, la caméra est en fait orientée vers le bas à un angle négatif de 90 degrés.
Rotation du sonar pour qu'il soit orienté droit vers le bas afin de voir l'arbre
Le faisceau sonar de 20 degrés est réparti le long de la paroi devant le ROV. Le nez du ROV se trouve contre le mur, et vous voyez donc la texture de ce mur comme si quelqu'un l'éclairait avec une lampe de poche.
Lorsque vous pointez le sonar vers le haut et le bord du tunnel, vous pouvez voir le câble et un peu de son ombre, ainsi que les bulles qui sortent de l'embouchure du tunnel. Ramenez le sonar à zéro degré à cet angle, et vous obtenez une coupe transversale des parois qui entourent le ROV.
Si vous l'inclinez un peu vers le haut, vous verrez le toit du tunnel devant le ROV. Si vous dépassez les 90 degrés, vous pouvez voir le bord du puits. Il y a ces bulles qui remontent le puits et qui sortent du tunnel, et mon câble ramènera le sonar vers le bas.
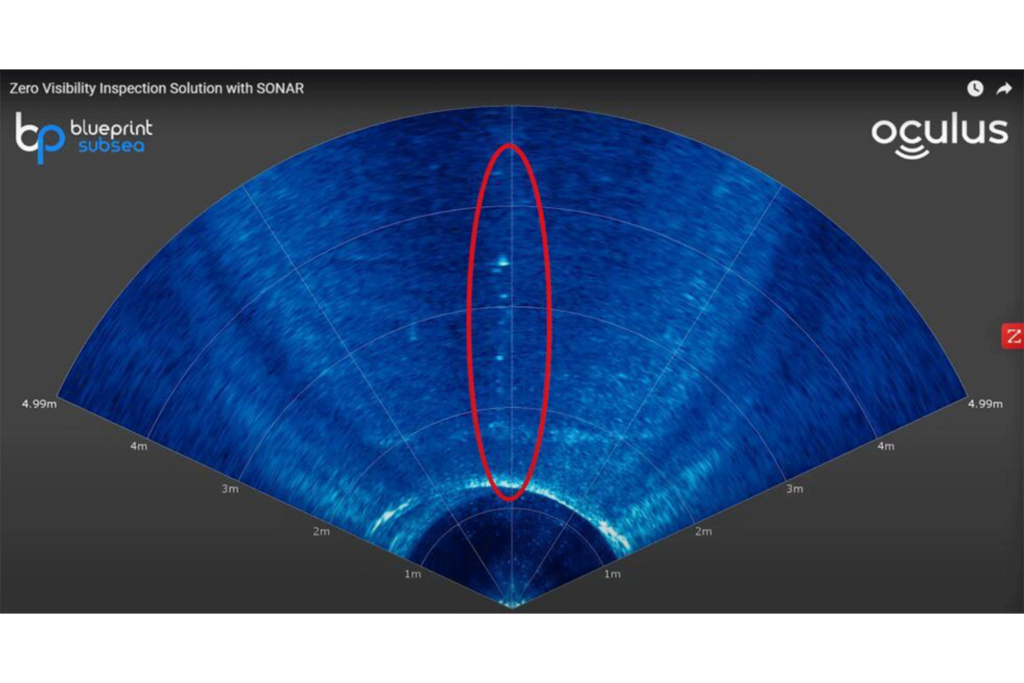
Voir les petits artefacts (bulles) avec le sonar imageur
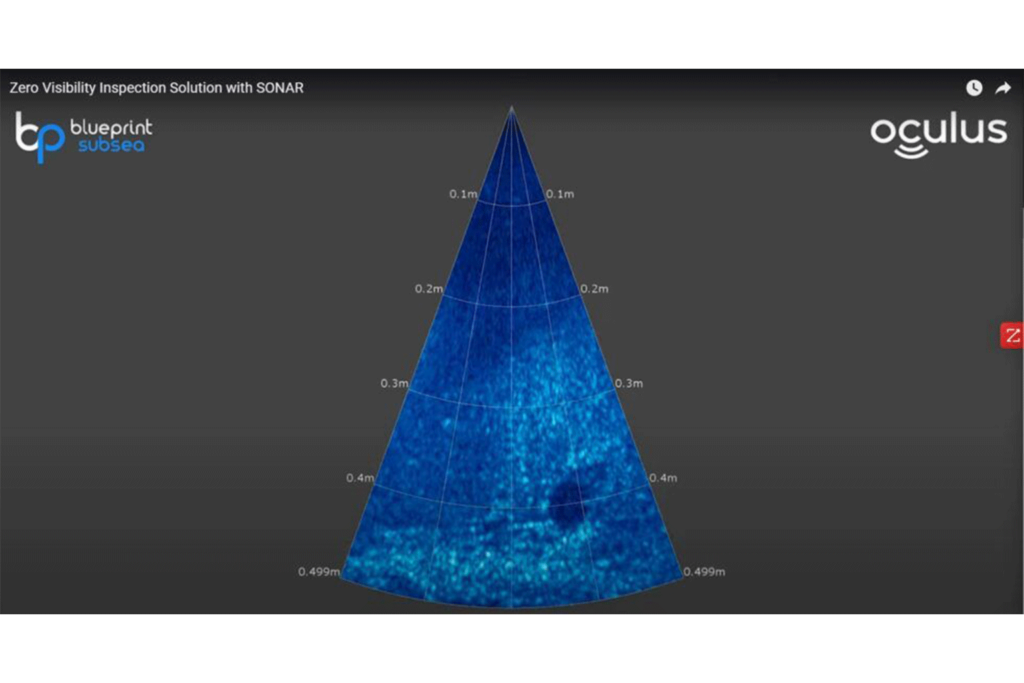
L'autre aspect intéressant du sonar rotatif est qu'il permet de pointer le sonar légèrement vers le bas et de voir le fond du tunnel.
Malheureusement, il est recouvert de sédiments, ce qui n'a pas permis aux opérateurs de se faire une idée aussi précise de la structure. Lors de cette inspection, ils se sont concentrés sur la couronne. Vous pouvez voir que les deux lignes à l'intérieur du tunnel sont les bords de la couche de sédiments.
Au fur et à mesure que nous avancions, en regardant le toit du tunnel, nous pouvions identifier des fissures là où il y a un peu d'ombre projetée derrière, ce qui signifie qu'il y a quelque chose de surélevé et ils ont trouvé qu'il y avait beaucoup de fissures.
Utilisation d'un sonar d'imagerie pour prendre la section transversale d'un tuyau et voir les niveaux de sédiments
Des sédiments se sont accumulés lorsque l'eau s'est échappée de la fissure et que ces sédiments sont restés collés à la paroi du tunnel.
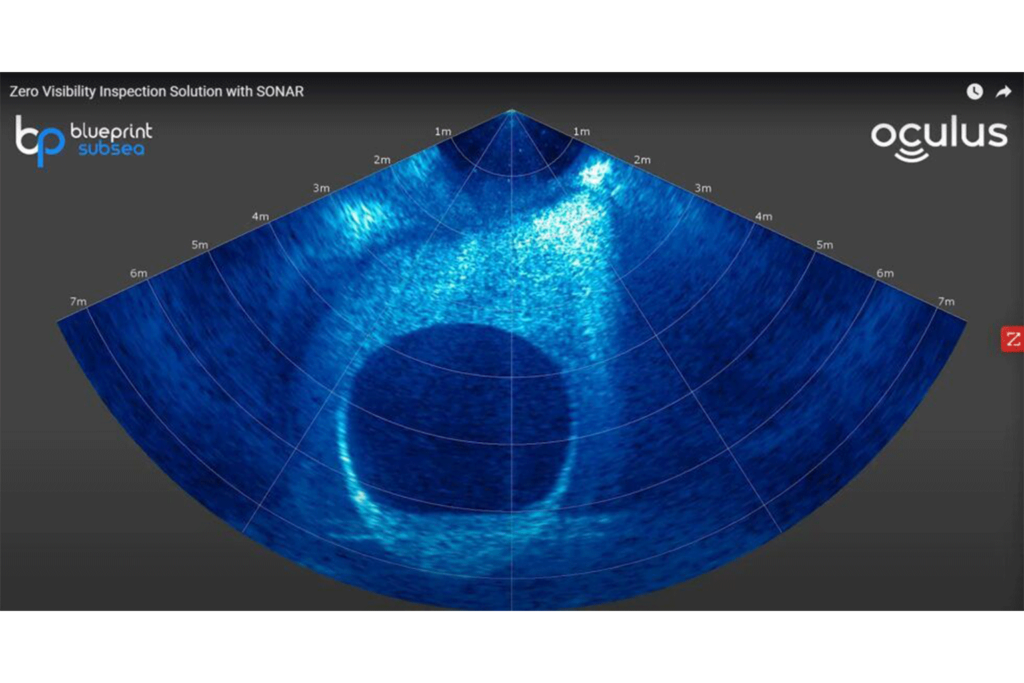
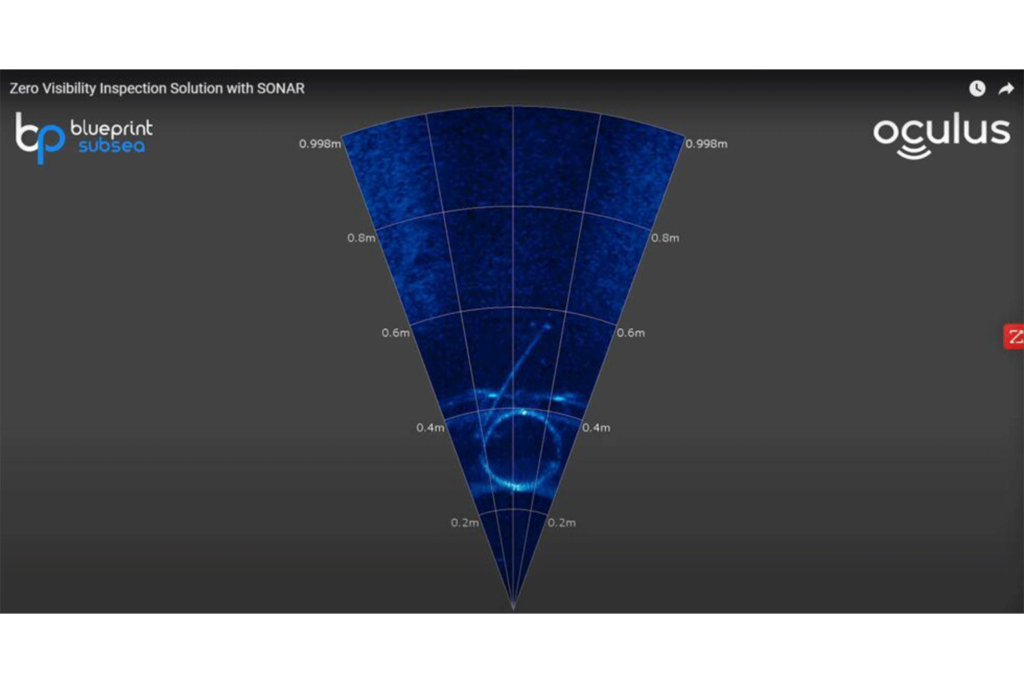
Une autre application intéressante est que vous pouvez pointer ce sonar tout droit vers le bas, comme vous l'avez vu plus tôt, mais parce qu'ils sont à l'intérieur de la structure environnante, ils obtiennent une coupe transversale du tunnel. Ainsi, cette ligne tout en bas traverse ce qui devrait être un cercle parfait.
C'est la surface des sédiments. À partir de là, il est possible d'effectuer des mesures régulières de la profondeur des sédiments tout en traversant un tunnel.
Identification d'une saillie latérale dans le tunnel
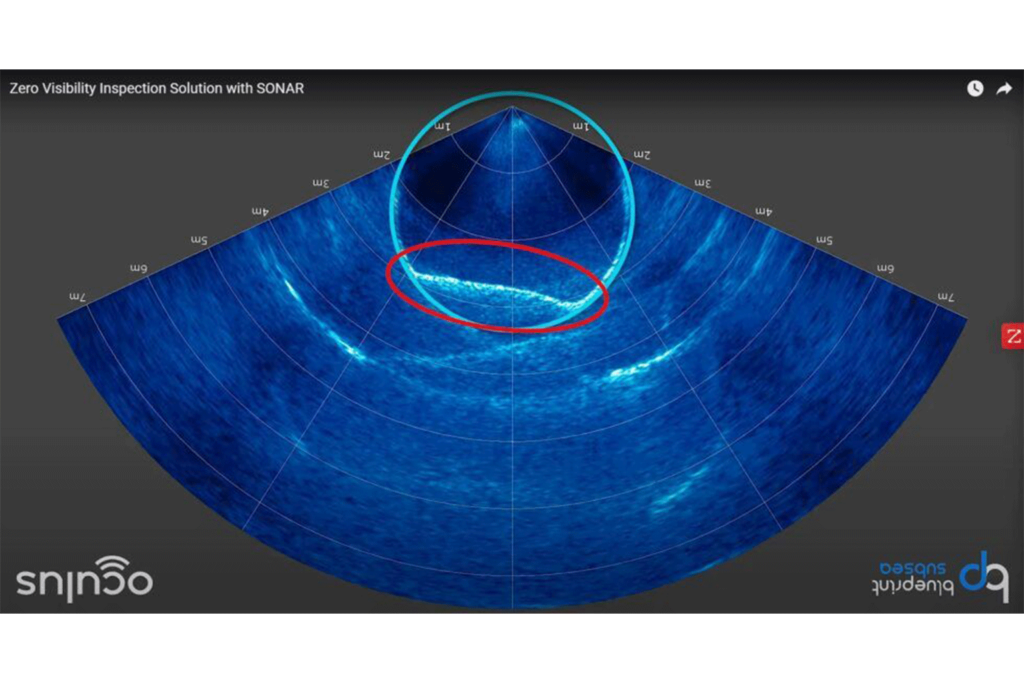
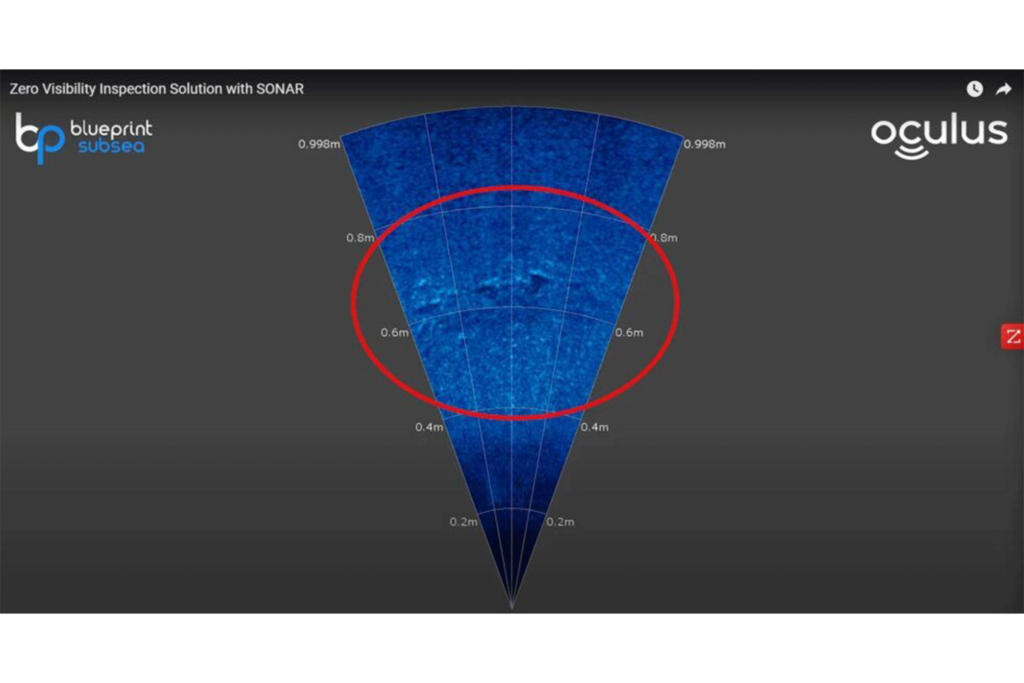
Un autre exemple de structure intéressante trouvée est illustré ci-dessous. Inclinez le sonar vers le haut et vous verrez qu'il y a une longue ombre. Chaque fois que vous voyez une ombre longue, cela signifie que l'objet est grand.
Il y a quelque chose qui dépasse du toit du tunnel. En manœuvrant le ROV et la tête du sonar, on peut obtenir une meilleure vue sous différents angles. En s'approchant et en ajustant légèrement l'angle, on peut voir un objet cylindrique.
Il s'agit d'un tuyau latéral qui fait saillie dans le toit du tunnel. Vous pouvez voir qu'il y a un peu de débris qui dépassent de l'extrémité, ils marquent donc l'emplacement de ce tuyau latéral.
Identification de petits défauts à l'aide d'un sonar imageur
Il est intéressant de noter qu'il s'agit du seul artefact observé dans ce tunnel de 530 mètres de long. Voici un autre artefact intéressant, dont vous verrez deux exemples.
Il y a des bulles au milieu, avec un peu d'ovale, ainsi qu'à l'autre extrémité de cet ovale. Cette fissure ovale n'est pas rare dans les tunnels de ce type. En tournant d'un côté à l'autre, vous pouvez obtenir un meilleur aperçu de sa forme.
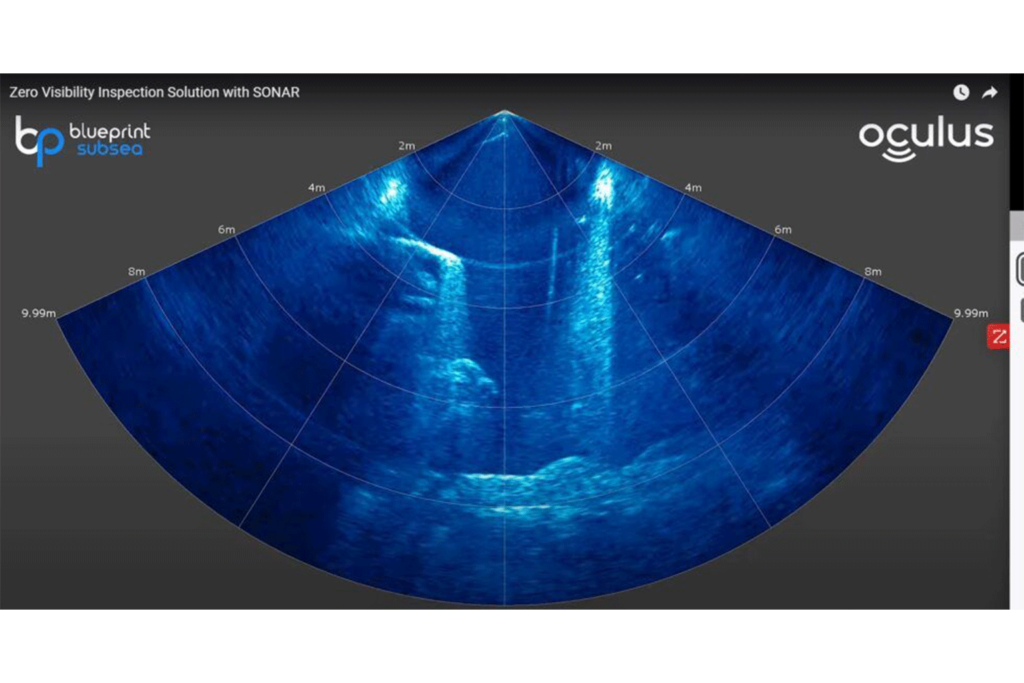
En utilisant le logiciel de sonar, soit en direct pendant l'inspection, soit après l'inspection lors de la révision, vous pouvez utiliser l'outil règle pour mesurer ces artefacts. Lorsqu'ils sont apparus à l'autre bout de l'un de ces tunnels, ils se trouvaient dans la base d'un grand réservoir, qui recueille l'eau afin d'éviter un écoulement excessif.
Il y avait trois pompes dans cette section, à droite, certaines de ces structures verticales avec un matériau plus épais au fond. Grâce au sonar, les opérateurs peuvent non seulement voir la structure générale à la recherche d'obstructions ou de débris, mais aussi se faire une idée de la texture du mur, en identifiant les fissures évidentes ou les cassures qui s'effritent.
Même si le sonar est réglé sur une portée de 10 mètres, vous pouvez voir des détails clairs à moins de 50 cm de la tête du sonar. Ces images sont également utiles pour connaître la situation à proximité des pompes et savoir où ne pas conduire pour éviter les enchevêtrements de câbles.
Balayage de structures complexes à l'aide d'un sonar imageur
Conseils d'utilisation du sonar imageur
Dans ces environnements, il est préférable de régler le gain à un niveau bas, de se déplacer lentement et de faire pivoter le sonar pour avoir une meilleure idée de l'environnement. Une approche calme et prudente permettra non seulement d'éviter les enchevêtrements de câbles, qui ne sont vraiment inquiétants qu'à proximité de structures complexes telles qu'une pompe, mais elle produira également des images sonar plus claires.
C'est particulièrement important si d'autres parties prenantes visionnent l'inspection par la suite, car il leur sera plus facile d'ajouter des notes et d'assimiler ce qui a été inspecté.
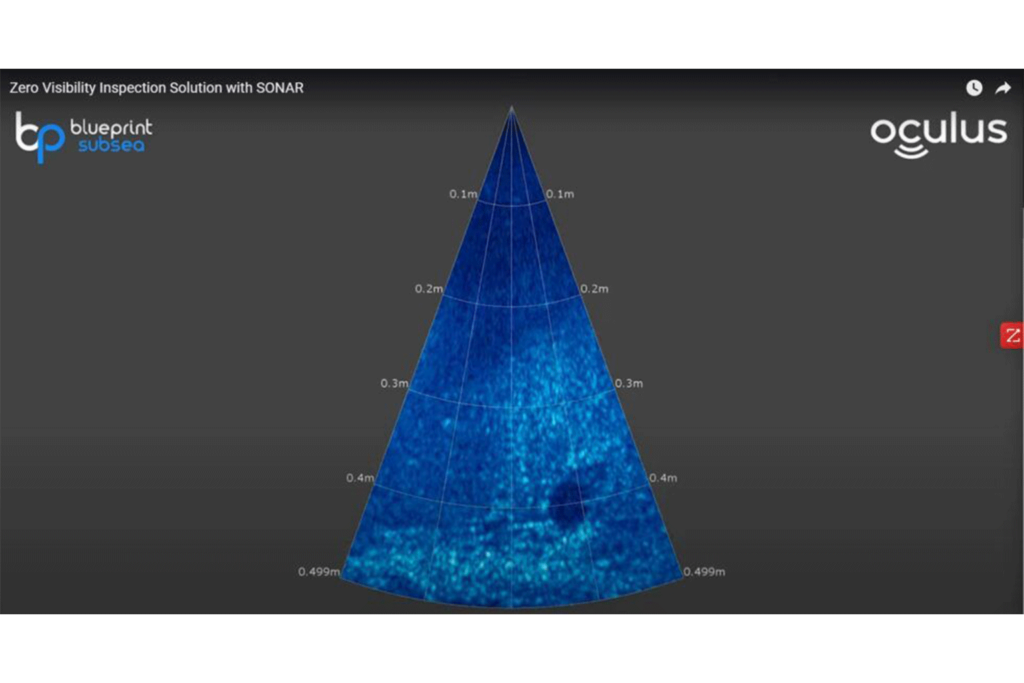
Utilisation d'un sonar imageur pour mesurer la taille des fosses
Sur cette photo, ils ont effectué une orbite orientée vers l'extérieur, le sonar pointant vers le bas, à la recherche d'artefacts dans la paroi d'un puits. On peut voir une fosse, ils s'en approchent et prennent des mesures de son emplacement et de sa taille.
Une dernière partie de l'étude a consisté à utiliser le ROV pour aider à la récupération d'un scanner monté sur trépied. Le trépied s'est cassé et le scanner est tombé au fond du puits. Le grappin du ROV est généralement capable d'aider à la récupération d'outils, mais le poids important de ce scanner, combiné à sa forme lisse, l'a rendu difficile à saisir avec nos manipulateurs.
D'autres objets, qu'il s'agisse de victimes de noyade, de dalles de béton ou même de scooters électriques, se sont révélés être des cibles parfaites pour les manipulateurs de Deep Trekker.
Récupération d'équipements perdus à l'aide d'une griffe de largage surveillée par le sonar imageur
Une grande griffe au bout de deux cordes était utilisée pour la récupérer. Lorsqu'ils tirent sur une corde, la griffe se referme autour d'un objet, et vous tirez sur l'autre corde pour récupérer la cible.
Le ROV équipé d'un sonar et positionné à proximité de la cible a pu surveiller ce processus et aider à déterminer où et quand tirer sur la grande pince.
Résumé de la mission
Dans l'ensemble, cette enquête a été un succès complet malgré la visibilité nulle de la caméra.
En utilisant le sonar d'imagerie combiné à la flexibilité de la tête de caméra rotative de la REVOLUTION, PipeTek a été en mesure d'identifier plusieurs points d'intérêt pour Toronto Water à évaluer et à planifier la réinspection, tels que les latéraux en saillie, les fosses, les fissures et les niveaux de sédiments.
Non seulement ces points d'intérêt ont été localisés et photographiés, mais ils ont également pu les mesurer à l'aide des outils sonar disponibles.
Deep Trekker pour l'inspection des tunnels et des infrastructures
Les sonars imageurs constituent une option extrêmement polyvalente et performante pour de nombreuses applications, et pas seulement pour l'inspection des tunnels. Les pilotes de ROV les considèrent souvent comme le capteur le plus important sur un ROV.
Les sonars d'imagerie Blueprint Subsea sont un excellent outil pour l'inspection des tunnels mais ne sont pas la seule option. Nous avons vu des profileurs de conduites Imagenex 831L et des sonars à balayage mécanique utilisés pour fournir des données précieuses pour l'inspection des tunnels.
Ces sonars à balayage ne fournissent pas le niveau de détail requis pour prendre des décisions d'évaluation de l'état des petits défauts, mais sont d'excellents outils pour déterminer l'état général des conduites, recueillir des données sur l'ovalisation, les niveaux de sédiments et identifier les défauts majeurs.
L'utilisation de ce type de technologie peut sembler intimidante au début, mais elle est plus facile une fois que l'on a un peu de pratique. Pour déterminer l'outil adéquat pour votre projet, il est important de connaître l'objectif final de l'inspection.
Publié à l'origine par Deep Trekker ici.