Subsea Positioning Products and Tools
Looking for the top subsea positioning systems or underwater navigation tools on the market?
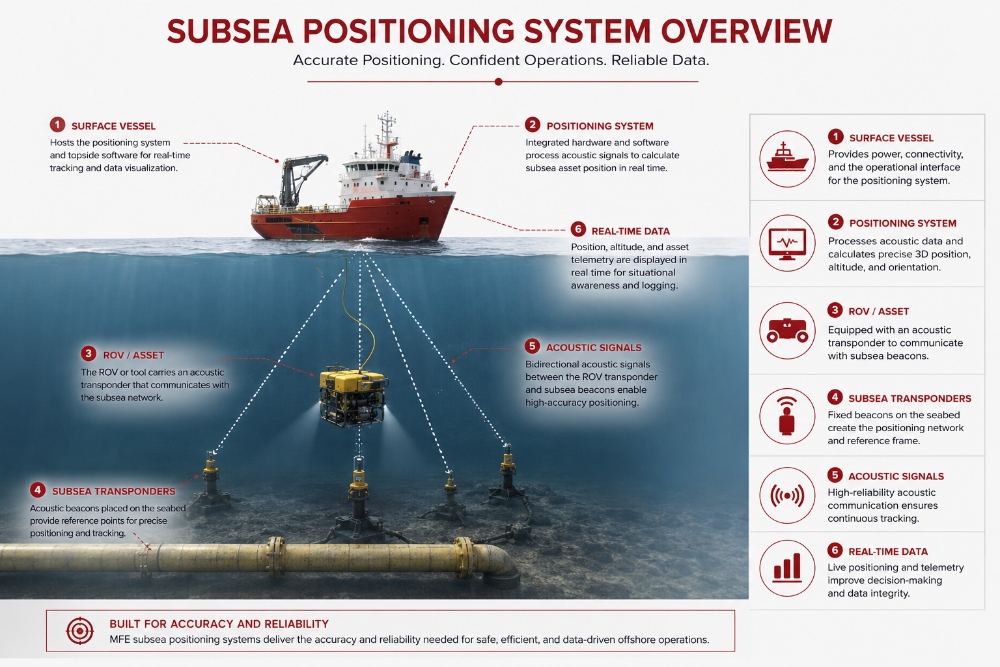
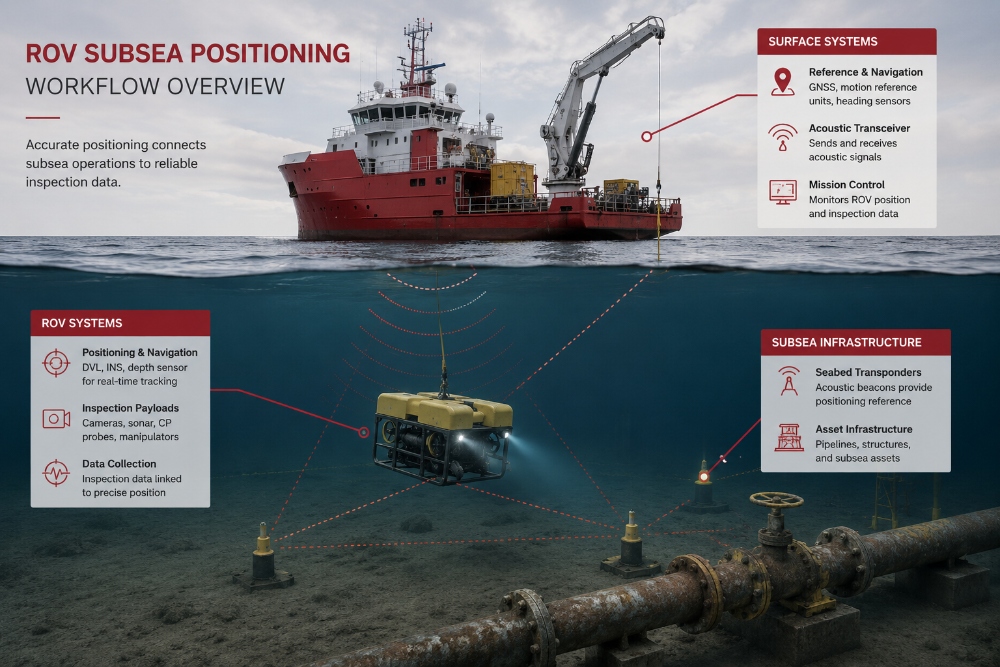
Below are some of the primary positioning and navigation technologies used across offshore inspections, ROV operations, hydrographic surveys, diver tracking workflows, and autonomous subsea missions.
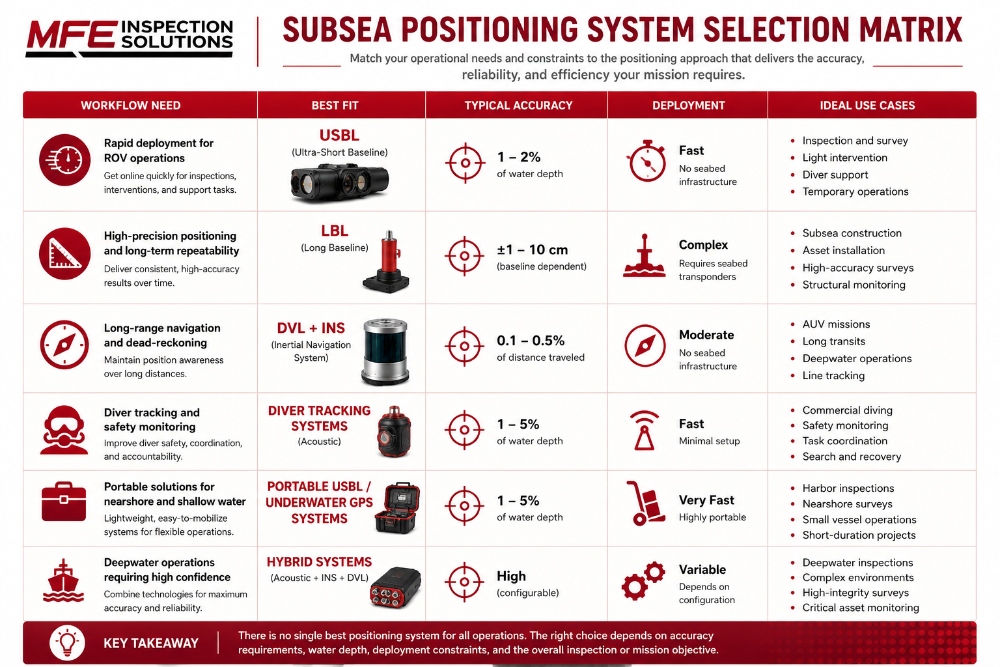
The right subsea positioning workflow depends on factors like:
- required positional accuracy
- water depth
- vessel setup and deck space
- ROV or AUV type
- inspection objectives
- whether permanent references can be installed
[AUVs and ROVs are both UUVs (Unmanned Underwater Vehicles)—Learn More in This In-Depth Guide]
USBL Positioning Systems
USBL (Ultra-Short Baseline) systems are among the most commonly used subsea positioning technologies in offshore operations.
These systems allow operators to track ROVs, divers, and underwater assets from a vessel without deploying a full network of seabed transponders. For many inspection and survey workflows, they offer a practical balance between deployment speed, operational simplicity, and positioning performance.
Here are the top USBL systems on the market:
1. Sonardyne Micro Ranger 2 USBL

The Sonardyne Micro Ranger 2 is a compact USBL positioning system designed for tracking ROVs, divers, and subsea assets during offshore operations.
Its portable architecture makes it well suited for inspection, intervention, diver support, and light construction workflows where operators need reliable positioning without deploying a full seabed reference network.
Key features of the Sonardyne Micro Ranger 2:
- Compact USBL architecture. Designed for vessel-based subsea positioning without extensive seabed infrastructure.
- Multi-target tracking. Supports tracking of ROVs, divers, and other subsea assets.
- Rapid deployment. Well suited for offshore operations where mobilization speed matters.
Buy or rent the Sonardyne Micro Ranger 2.
2. Sonardyne Mini Ranger USBL
The Sonardyne Mini Ranger is designed for portable underwater positioning workflows where vessel size, mobilization speed, and operational simplicity are priorities.
These systems are commonly used for nearshore inspections, smaller ROV deployments, scientific missions, and support operations where teams need subsea positioning capability without a larger offshore survey spread.
The Mini Ranger is frequently selected when operators need reliable positioning while minimizing system footprint and deployment complexity.
Key features of the Sonardyne Mini Ranger:
- Portable deployment. Designed for smaller vessels and rapidly mobilized operations.
- ROV and diver tracking. Supports a range of underwater positioning applications.
- Operational flexibility. Useful across inspection, survey, and support missions.
3. Applied Acoustics Easytrak Vesta USBL
The Easytrak Vesta USBL system is designed for subsea tracking and positioning workflows involving ROVs, towfish, divers, and underwater assets.
Portable USBL systems like the Vesta are commonly selected for inspection and survey operations where fast deployment and operational flexibility are important.
The system is frequently used in offshore and nearshore environments where operators need real-time positional awareness during underwater operations.
Key features of the Easytrak Vesta:
- Portable USBL positioning. Supports flexible deployment across multiple vessel types.
- Multi-asset tracking. Compatible with a variety of underwater platforms and targets.
- Inspection and survey workflows. Designed for practical offshore operations.
Diver Tracking Systems
Diver tracking systems help offshore teams maintain real-time awareness of diver location and movement throughout underwater operations.
These systems are often used to improve safety, coordinate underwater work, and provide surface crews with better visibility into ongoing dive activities.
Here is the top diver tracking system on the market:
4. Sonardyne DiveTrack
DiveTrack is a diver tracking system designed to improve positional awareness during underwater diving operations.
The system helps support safer and more coordinated subsea work by providing real-time visibility into diver location relative to the support vessel and surrounding assets.
Diver tracking systems are commonly used during offshore inspections, maintenance operations, and underwater intervention projects.
Key features of Sonardyne DiveTrack:
- Real-time diver tracking. Improves awareness during subsea operations.
- Operational safety support. Helps coordinate underwater personnel and tasks.
- Portable deployment. Suitable for a variety of offshore diving workflows.
INS and Navigation Systems
Acoustic positioning systems are often paired with inertial navigation technologies to improve navigation continuity and reduce positional drift.
These systems are particularly important for AUVs, survey platforms, and inspection vehicles operating between acoustic updates or in environments where positioning conditions are challenging.
Here is the top INS systems on the market:
5. Sonardyne Sprint-Nav Mini INS
The Sprint-Nav Mini combines inertial navigation system (INS) functionality with Doppler Velocity Log (DVL) technology to support underwater vehicle navigation and positioning.
INS-based workflows are commonly used when operators need smoother navigation, dead-reckoning support, and improved positional stability between acoustic updates.
The system is particularly valuable for survey, inspection, and autonomous navigation workflows where positional continuity matters.
Key features of the Sprint-Nav Mini:
- Integrated INS and DVL. Combines navigation and velocity estimation in a single system.
- Reduced positional drift. Helps maintain navigational continuity underwater.
- AUV and ROV support. Designed for modern subsea vehicle workflows.
Underwater Communication and Robotics
Modern subsea robotics increasingly rely on wireless communication, navigation support systems, and compact robotic platforms.
These technologies help expand what underwater vehicles can accomplish in confined spaces, difficult-access environments, and emerging autonomous inspection workflows.
Here are the top underwater comms systems on the market:
6. Hydromea LUMA Subsea Modem
The Hydromea LUMA subsea modem supports underwater wireless communication and navigation-related workflows for subsea robotics and autonomous systems.
Wireless underwater communication systems are increasingly being integrated into subsea operations where tether reduction, data transfer, and multi-vehicle coordination are important.
The platform helps support emerging underwater robotics applications and connected subsea workflows.
Key features of the Hydromea LUMA:
- Wireless subsea communication. Supports underwater data exchange.
- Robotics integration. Designed for autonomous and remotely operated systems.
- Multi-vehicle workflows. Supports coordinated subsea operations.
7. Hydromea Wireless ROV Platform
Hydromea’s wireless ROV systems are designed for compact underwater inspection and robotic workflows where traditional tether management may be restrictive.
These systems are particularly relevant for confined spaces, infrastructure inspections, and emerging autonomous or semi-autonomous subsea workflows.
The wireless architecture can simplify operations in environments where tether management presents operational challenges.
Key features of the Hydromea Wireless ROV Platform:
- Tether-light operation. Reduces reliance on traditional tether management.
- Compact inspection platform. Designed for difficult-access environments.
- Robotics-focused architecture. Supports emerging subsea inspection workflows.
Survey and Localization Tools
Positioning workflows often rely on additional survey, localization, and mapping technologies to improve situational awareness and asset documentation.
These systems are commonly integrated with navigation and positioning workflows during offshore inspections, hydrographic surveys, and subsea infrastructure projects.
Here are the top subsea survey and localization tools on the market:
8. TSS 660 E Pipe and Cable Tracking System
The TSS 660 E is designed for subsea pipe and cable tracking applications.
Tracking systems like these are commonly used during subsea infrastructure inspections, burial verification, cable localization, and offshore asset mapping operations.
The system helps operators identify and document the location of critical subsea infrastructure.
Key features of the TSS 660 E:
- Pipe and cable localization. Designed for subsea infrastructure tracking.
- Inspection support. Useful for verification and asset documentation workflows.
- Survey integration. Supports broader subsea mapping operations.
9. Norbit WBMSX Multibeam Sonar
The Norbit WBMSX is a multibeam sonar system used for hydrographic survey, subsea mapping, and underwater localization workflows.
Multibeam systems are frequently paired with positioning and navigation systems to support accurate bathymetric mapping and underwater asset documentation.
The system helps generate detailed spatial data for survey and inspection projects.
Key features of the Norbit WBMSX:
- Multibeam mapping. Supports bathymetric and subsea survey workflows.
- Positioning integration. Works alongside navigation and localization systems.
- High-resolution data collection. Designed for detailed underwater mapping.
10. Geometrics G882 Magnetometer
The Geometrics G882 is a marine magnetometer used for subsea detection, localization, and survey operations.
Magnetometers are commonly used to locate pipelines, cables, debris, and ferrous underwater objects during offshore inspection and survey missions.
The system is frequently deployed when operators need to locate or verify buried or difficult-to-identify subsea assets.
Key features of the Geometrics G882:
- Subsea object detection. Helps locate ferrous assets and infrastructure.
- Survey support. Commonly used during offshore localization projects.
- Infrastructure verification. Useful for pipeline and cable investigations.