

Offshore Resources / Autonomous Underwater Vehicles (AUVs): Best AUVs, Uses & How They Work
Guide
Autonomous Underwater Vehicles (AUVs): Best AUVs, Uses & How They Work
An Autonomous Underwater Vehicle (AUV) is a robotic submarine that can travel underwater on its own to collect data, map the seafloor, and perform survey missions.
→ Jump to the best AUVs on the market.
AUVs are commonly used for subsea missions like hydrographic surveying, offshore energy projects, and environmental monitoring in which large areas need to be surveyed efficiently.
Unlike remotely operated vehicles (ROVs), which remain connected to operators through a tether, AUVs typically follow pre-programmed mission plans and collect data autonomously while underwater.
Other common terms related to AUVs include:
- Autonomous underwater vehicle
- Autonomous underwater vehicles
- Unmanned underwater vehicle (UUV)
- Underwater robot
- Underwater drone
In this guide, we’ll cover what an AUV is, how it works, how it differs from ROVs and other underwater vehicles, and some of the leading AUV platforms on the market.
The Best AUVs on the Market
Looking for an AUV?
Below are the best autonomous underwater vehicles on the market today.
Here’s the list:
1. Kongsberg HUGIN
The HUGIN family is one of the most established AUV platforms in the world and has been deployed across offshore energy, defense, and scientific survey missions for decades.
Its long endurance, deepwater capability, and extensive sensor integration options have made it a common choice for large-scale subsea survey operations.
Key features of the Kongsberg HUGIN:
- Long-range autonomous missions. Designed for large-area survey coverage.
- Flexible sensor payloads. Supports mapping, imaging, and environmental survey applications.
- Deepwater capability. Frequently deployed in demanding offshore environments.
2. HII REMUS 100
The REMUS 100 is a compact AUV designed for shallow-water survey, environmental monitoring, military operations, and academic research.
Its portability and relatively simple deployment requirements have contributed to widespread adoption across government, commercial, and research organizations.
Key features of the REMUS 100:
- Compact design. Easy to transport and deploy.
- Shallow-water survey capability. Suitable for coastal and nearshore operations.
- Multi-mission flexibility. Supports a variety of sensor payloads and workflows.
3. HII REMUS 600
The REMUS 600 expands on the REMUS platform by supporting deeper-water operations and longer-duration missions.
It’s commonly used for offshore surveys, defense applications, and subsea infrastructure assessments.
Key features of the REMUS 600:
- Extended endurance. Designed for longer autonomous missions.
- Deepwater operation. Suitable for offshore and subsea environments.
- Advanced payload integration. Supports sophisticated survey and inspection sensors.
4. Teledyne Gavia
The Gavia platform is a modular AUV system widely used in scientific, commercial, and defense applications.
Its modular architecture allows operators to configure the vehicle for different mission profiles and sensor requirements.
Key features of the Teledyne Gavia:
- Modular construction. Supports mission-specific configurations.
- Flexible payload options. Accommodates a wide range of subsea sensors.
- Multi-industry adoption. Used across research, commercial, and government sectors.
5. Bluefin-12
The Bluefin-12 is designed for autonomous survey operations where portability and efficient deployment are important considerations.
It’s commonly used for hydrographic surveys, environmental assessments, and defense-related missions.
Key features of the Bluefin-12:
- Compact survey platform. Designed for efficient field deployment.
- Autonomous mapping capability. Supports seabed and environmental surveys.
- Flexible mission profiles. Suitable for a variety of underwater tasks.
6. Bluefin-21
The Bluefin-21 is a larger AUV designed for deepwater operations and long-range autonomous survey missions.
The platform has been used in high-profile offshore search, survey, and mapping projects around the world.
Key features of the Bluefin-21:
- Deepwater operation. Built for challenging subsea environments.
- Long-range mission capability. Designed for extended survey coverage.
- High-capacity payload support. Accommodates advanced survey sensors.
7. OceanServer Iver4
The Iver4 is a compact autonomous underwater vehicle designed for hydrographic survey, environmental monitoring, and infrastructure assessment programs.
Its portability and ease of deployment make it attractive for organizations that require frequent field operations.
Key features of the OceanServer Iver4:
- Portable design. Easy to transport and launch.
- Survey-focused workflow. Supports mapping and monitoring missions.
- Autonomous mission execution. Designed for repeatable survey operations.
8. Saab Sabertooth
The Sabertooth occupies a unique position between traditional ROV and AUV architectures.
Operators can use it in both tethered and autonomous modes, providing flexibility for missions that require varying levels of intervention and autonomy.
Key features of the Saab Sabertooth:
- Hybrid vehicle architecture. Supports autonomous and tethered operations.
- Offshore-focused design. Built for demanding subsea environments.
- Flexible deployment options. Suitable for complex subsea workflows.
9. Exail A18D
The A18D is a long-range autonomous survey vehicle designed for hydrographic, defense, and offshore mapping missions.
It’s frequently deployed where efficient coverage of large subsea areas is required.
Key features of the Exail A18D:
- Long-endurance operation. Supports extended autonomous missions.
- Survey-focused design. Optimized for data collection and mapping.
- Large-area coverage. Well suited for offshore survey programs.
10. Exail DriX H8
The DriX H8 combines autonomous operation with advanced hydrographic survey capabilities and modern navigation technologies.
It’s commonly used in offshore survey and mapping programs where efficient data collection is critical.
Key features of the Exail DriX H8:
- Hydrographic survey focus. Designed for mapping and survey operations.
- Autonomous mission capability. Supports repeatable survey workflows.
- Modern navigation architecture. Integrates with advanced positioning technologies.
11. ECA Group A18-M
The A18-M is a military-grade autonomous underwater vehicle used for mine countermeasures, seabed surveys, and defense-related missions.
The platform is designed for reliable operation in complex underwater environments.
Key features of the ECA Group A18-M:
- Defense-focused platform. Frequently used for military applications.
- Autonomous survey capability. Supports seabed assessment and mapping.
- Mission adaptability. Designed for multiple underwater mission types.
12. Kongsberg HUGIN Superior
The HUGIN Superior represents one of the most advanced configurations within the HUGIN family and is designed for demanding deepwater survey programs.
It’s frequently deployed where long endurance, extensive sensor integration, and high-quality survey data are required.
Key features of the Kongsberg HUGIN Superior:
- Long-duration autonomous missions. Built for extensive offshore survey programs.
- Advanced sensor integration. Supports sophisticated subsea data collection.
- Deepwater survey capability. Designed for challenging offshore environments.
What Is an AUV?
An autonomous underwater vehicle (AUV) is an untethered robotic platform that can navigate underwater and perform missions without continuous control from a human operator.

Unlike a remotely operated vehicle (ROV), which remains connected to a surface vessel through a tether and is actively piloted during a mission, an AUV is typically programmed before deployment and then executes its mission independently.
The vehicle collects data, follows predefined routes, and returns with the information gathered during the operation.
When operators need to inspect a specific area in real time, manipulate equipment, or respond immediately to changing conditions, an ROV is often the better choice.
But when the objective is to survey large areas efficiently, collect consistent data, or operate beyond the practical limits of tethered systems, an AUV can offer significant advantages.
AUVs are commonly used for:
- Seabed mapping
- Hydrographic surveying
- Offshore energy surveys
- Environmental monitoring
- Military operations
- Scientific research
AUV missions often involve covering dozens or even hundreds of square kilometers of seabed while collecting data from sonar systems, cameras, magnetometers, water quality sensors, and other payloads.
In offshore operations, AUVs are frequently deployed to gather information about subsea assets, planned infrastructure routes, and surrounding environments before construction, maintenance, or inspection activities begin.
Rather than replacing other underwater technologies, they often serve as part of a larger subsea data collection workflow.
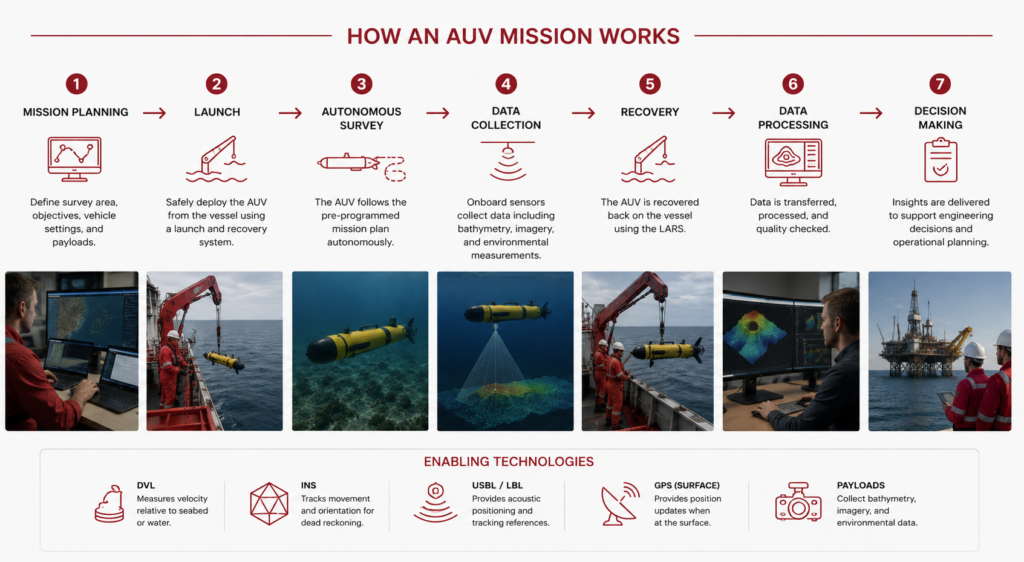
How an AUV Operates
A typical AUV mission begins with operators creating a mission plan that defines where the vehicle should travel, what sensors it should use, and what data should be collected.
Once launched, the vehicle follows that mission plan autonomously.
During the mission, onboard underwater navigation systems continuously estimate position and movement while survey sensors collect data. After recovery, operators download and process the collected information for analysis.
This approach lets AUVs to operate without a tether, reducing drag and enabling efficient coverage of large areas.
However, it also creates navigation challenges because the vehicle can’t rely on GPS while underwater.
As a result, most AUVs depend on technologies like DVLs, inertial navigation systems, acoustic positioning systems, and periodic GPS updates when surfacing.
We’ll cover these navigation systems later in this guide because they play a major role in overall mission performance.
What AUVs Don’t Do Well
AUVs are powerful survey and data collection tools, but they’re not the right solution for every underwater mission.
Here are some of the main limitations operators should consider:
1. Limited Real-Time Control
Because AUVs operate autonomously, operators have less control during a mission than they would with a tethered ROV.
This makes AUVs less suitable for tasks that require continuous human input or rapid decision-making.
2. Limited Intervention Capability
Most AUVs are designed to collect data rather than interact with equipment.
If a mission requires valve manipulation, tool deployment, repairs, or physical measurements, an ROV is often the better choice.
3. Navigation Drift
AUVs cannot use GPS underwater, so small positioning errors can accumulate over time.
Operators often use DVLs, inertial navigation systems, and acoustic positioning technologies to reduce this drift.
4. Operational Complexity
AUV missions require planning, navigation design, deployment procedures, recovery operations, and data processing.
The benefits often justify the effort, but simpler missions may not require an AUV.
AUV vs. ROV vs. UUV vs. USV
Many people use terms like AUV, ROV, UUV, and USV interchangeably, but they describe different types of unmanned maritime systems.
Understanding the distinctions is important, because each platform is designed to solve different operational challenges.
Here’s an overview:
AUV vs. UUV
UUV stands for unmanned underwater vehicle.
This is a broad category that includes both AUVs and ROVs. In other words, every AUV is a UUV, but not every UUV is an AUV.
When manufacturers, researchers, or defense organizations refer to UUVs, they are often describing the broader family of underwater robotic systems rather than a specific vehicle type.
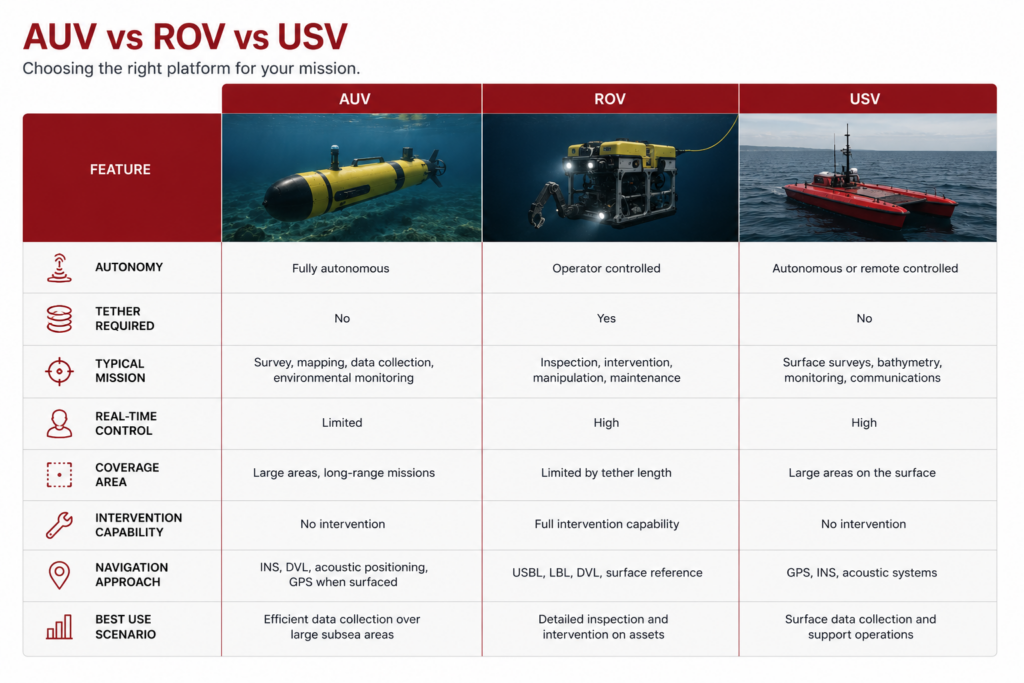
AUV vs. ROV
The biggest difference between an AUV and an ROV is autonomy.
- An AUV operates independently after launch, following a predefined mission plan.
- An ROV remains connected to operators through a tether and receives real-time control inputs throughout the mission.
ROVs are generally preferred when operators need live video, intervention capability, manipulation tools, or immediate decision-making.
AUVs are often preferred when the goal is efficient data collection across large areas.
Neither platform is inherently better. The right choice depends on whether the mission requires intervention or autonomous surveying.
AUV vs USV
A USV, or unmanned surface vehicle, operates on the water’s surface rather than underwater.
USVs are commonly used for hydrographic surveying, environmental monitoring, security operations, and data collection missions where continuous GPS access is beneficial.
In some offshore workflows, USVs and AUVs are deployed together.
The USV may provide communications, navigation support, or mission oversight while the AUV performs underwater data collection.
When Each Vehicle Type Makes Sense
If the mission requires physical interaction with an asset, live operator control, or detailed visual inspection, an ROV is often the preferred solution.
If the mission requires efficient collection of data across large areas of seabed or water column, an AUV may be a better fit.
When surface operations are sufficient, a USV can often deliver valuable survey data with lower operational complexity.
The most effective offshore programs frequently combine multiple vehicle types rather than relying on a single platform.
The decision is rarely about choosing the “best” vehicle—it’s about choosing the right vehicle for the specific operational objective.
What Are AUVs Used For?
AUVs are most valuable when operators need to collect large amounts of underwater data efficiently and consistently.
Because they can operate without a tether and follow pre-programmed routes, AUVs are often deployed for survey and mapping missions that would be time-consuming or impractical with diver-based methods or tethered vehicles.
The specific applications vary by industry, but most AUV missions fall into a handful of common categories.
Here are the most common types of AUV missions.
Offshore Energy and Subsea Asset Support
Within offshore energy, AUVs are commonly used to support field development, infrastructure planning, and asset management programs.
While they do not typically replace detailed intervention-focused inspections performed by ROVs, they can provide valuable survey data that helps operators understand asset conditions, seabed changes, and surrounding environments.
In practice, many offshore projects use AUVs, ROVs, and acoustic positioning technologies together. Each tool performs a different role within the overall subsea workflow.
Hydrographic Surveying and Seafloor Mapping
One of the most common uses for AUVs is hydrographic surveying.
Using multibeam sonar, side-scan sonar, and other survey sensors, AUVs can create detailed maps of the seafloor and identify underwater features that may affect navigation, engineering projects, or future inspections.
These surveys are frequently performed before offshore construction projects, subsea cable installations, dredging operations, and offshore wind developments.
Pipeline, Cable, and Infrastructure Survey
Many offshore operators use AUVs to gather information about subsea infrastructure corridors.
The vehicle can follow planned pipeline routes, inspect existing cable corridors, or collect environmental data that helps engineers evaluate installation risks.
Because an AUV can cover long distances autonomously, it often provides a more efficient survey platform than an ROV when continuous intervention is not required.
Environmental and Scientific Research
Research organizations frequently use AUVs to study ocean conditions, marine habitats, and environmental changes.
Depending on the payload configuration, an AUV may collect information about water quality, temperature, salinity, currents, marine ecosystems, or seabed conditions.
The ability to execute repeatable missions makes AUVs particularly useful for long-term monitoring programs.
How AUVs Navigate Underwater
One of the biggest challenges facing any autonomous underwater vehicle is navigation.
Unlike aircraft, surface vessels, or ground vehicles, AUVs cannot rely on continuous GPS positioning while underwater.
Once the vehicle submerges, satellite signals are no longer available, forcing the AUV to estimate its position using onboard navigation systems and external references.
This is why subsea navigation architecture often becomes one of the most important considerations when planning an AUV program.
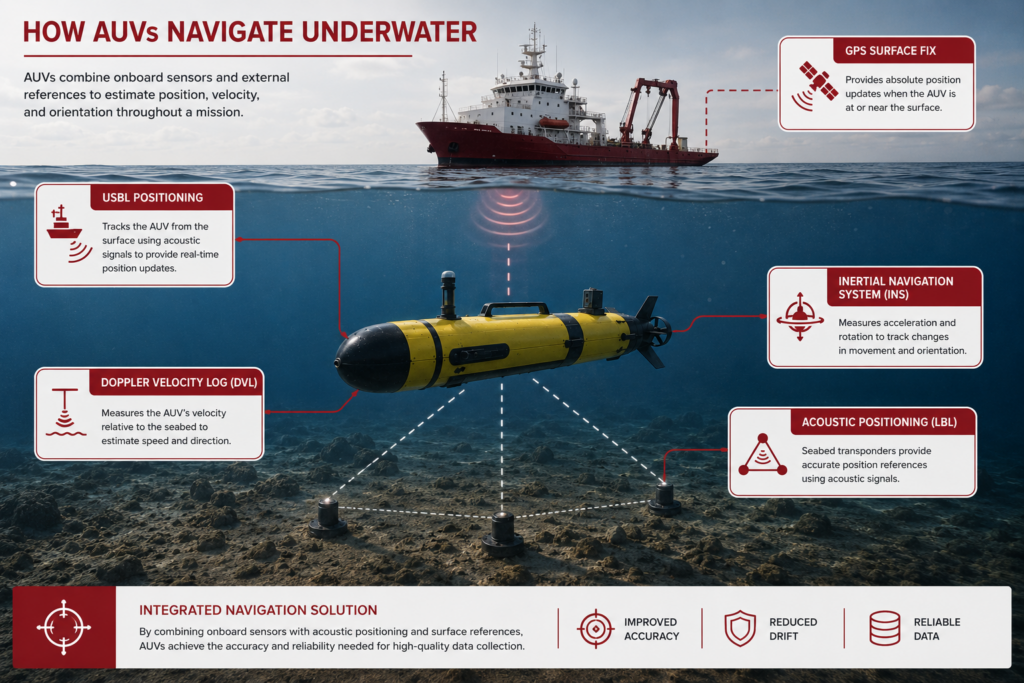
Why GPS Doesn’t Work Underwater
GPS signals don’t travel effectively through water.
As a result, an AUV typically receives a GPS position before launch and may obtain additional GPS updates whenever it surfaces. During the submerged portion of the mission, the vehicle must rely on other navigation technologies.
The longer the vehicle remains underwater, the more important those navigation systems become.
Here the main technologies that support subsea navigation for AUVs and other underwater vehicles:
DVL and INS for Dead Reckoning
Many AUVs use a combination of Doppler Velocity Logs (DVLs) and inertial navigation systems (INS) to estimate their position throughout a mission.
A DVL measures the vehicle’s movement relative to the seafloor or surrounding water, while the INS continuously tracks changes in motion and orientation.
Together, these systems allow the vehicle to estimate its position even when no external reference is available.
USBL, LBL, and Acoustic Positioning Systems
To improve positional accuracy, many operators supplement onboard navigation systems with acoustic positioning technologies.
These systems use sound rather than satellites to determine the vehicle’s location underwater.
Ultra-short baseline (USBL) systems are commonly used to track vehicles from a surface vessel. Long baseline (LBL) systems use a network of seabed transponders to provide highly accurate positioning references.
These technologies can significantly reduce navigation uncertainty, particularly during long missions or when precise positioning is required.
How AUVs Fit into a Larger Navigation Architecture
Most offshore operators are not choosing between an AUV and a positioning system.
Instead, they’re determining which combination of navigation technologies will allow the AUV to achieve the required level of positioning accuracy for the mission.
For some survey programs, a DVL and INS may provide sufficient performance. For others, USBL, LBL, or additional acoustic positioning infrastructure may be required.
The most effective AUV programs begin with the mission requirements and then build the navigation architecture around those requirements.
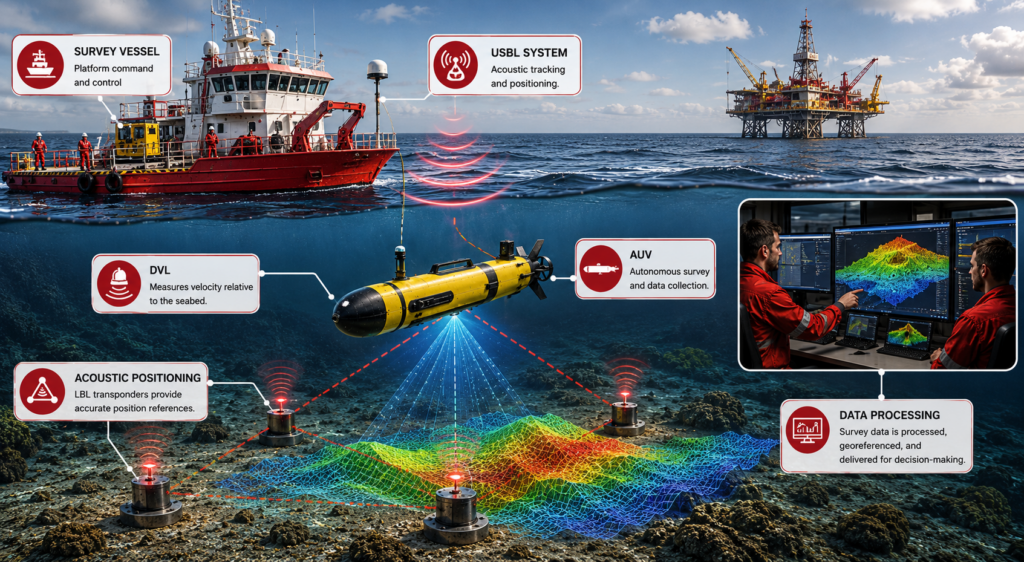
How AUVs Fit into a Subsea Positioning Workflow
Choosing the right AUV is only part of the equation.
For many offshore projects, the larger challenge is determining how the vehicle will maintain positional awareness throughout the mission and how the collected data will be tied back to real-world coordinates.
This is why experienced operators often think about AUVs as one component within a broader subsea positioning architecture.
The exact navigation workflow depends on mission requirements, operational constraints, and the level of positional accuracy required.
AUV + DVL
A Doppler Velocity Log (DVL) is one of the most common navigation sensors found on modern AUVs.
By measuring the vehicle’s movement relative to the seafloor or surrounding water, a DVL helps the AUV estimate its position throughout a mission.
For many survey operations, the DVL serves as a foundational component of the navigation system.
AUV + USBL
When operators need additional positional confidence, USBL systems can provide external tracking references from a surface vessel.
Rather than relying entirely on onboard navigation estimates, the AUV can be tracked acoustically throughout the mission.
This approach is commonly used when accurate georeferencing is important or when mission planners want additional visibility into vehicle location.
AUV + Acoustic Positioning Systems
Some operations require more sophisticated positioning architectures.
Depending on the mission, operators may use USBL, LBL, SBL, or other acoustic positioning technologies to improve accuracy and reduce navigation uncertainty.
These systems become increasingly important when missions involve long durations, deepwater environments, or highly precise survey requirements.
Building the Right Navigation Architecture
The most effective AUV programs rarely begin by selecting a vehicle and then adding navigation technologies afterward.
Instead, operators start with the mission requirements and determine the positioning performance needed to achieve the desired outcome.
From there, they build a navigation architecture that may include DVLs, inertial navigation systems, USBL tracking, acoustic positioning infrastructure, or some combination of these technologies.
This system-level approach helps ensure that the vehicle, sensors, and positioning technologies work together to deliver reliable, decision-ready data.
[Learn more about building a navigation architecture in our guide to subsea positioning.]
AUV FAQs
Here are answers to some of the most commonly asked questions about AUVs.
What does AUV stand for?
AUV stands for Autonomous Underwater Vehicle. These robotic platforms can navigate underwater and perform missions without continuous human control.
Is an AUV the same as an underwater drone?
Many people use the term underwater drone as a broad description for robotic underwater vehicles. In practice, an AUV is a specific type of underwater drone that operates autonomously rather than through continuous remote control.
What’s the difference between an AUV and an ROV?
An AUV operates independently using a pre-planned mission, while an ROV remains connected to operators through a tether and receives real-time control inputs. AUVs are generally used for autonomous data collection, while ROVs are commonly used for inspection, intervention, and manipulation tasks.
Can AUVs use GPS underwater?
No. GPS signals do not travel effectively through water. AUVs typically use navigation technologies such as DVLs, inertial navigation systems, and acoustic positioning systems while submerged, then obtain GPS updates when operating at or near the surface.
What sensors can an AUV carry?
The answer depends on the vehicle and mission requirements. Common payloads include multibeam sonar, side-scan sonar, cameras, magnetometers, environmental sensors, and other survey instruments used for mapping, monitoring, and data collection.
Are AUVs used for offshore inspections?
AUVs are often used to support offshore inspection and asset management programs, particularly when large areas must be surveyed efficiently. However, detailed inspection and intervention activities are frequently performed using ROVs because they provide real-time operator control and direct interaction with assets.
What industries use AUVs?
AUVs are used across offshore energy, hydrographic surveying, oceanographic research, defense, environmental monitoring, offshore wind, telecommunications, and other industries that require underwater data collection.
How accurate are AUV navigation systems?
Navigation accuracy depends on the vehicle, mission duration, environmental conditions, and positioning technologies used. Many operators combine DVLs, inertial navigation systems, USBL tracking, and acoustic positioning technologies to improve accuracy and reduce navigation drift.